Phare
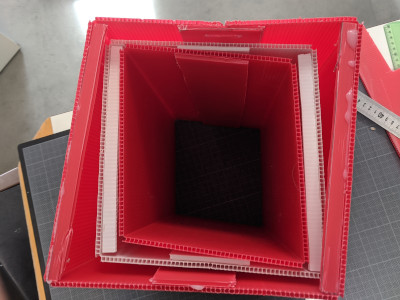
On a ajouté les butées sur le deuxième étage, et on a commencé le troisième étage en plastique rouge.
Prochaine séance : ajouter les butées sur le troisième étage, faire les fentes et tester avec le ruban
Robot principal
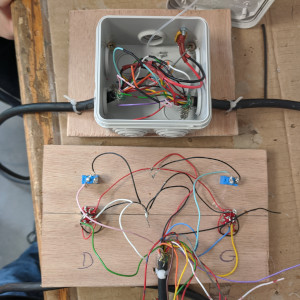
On a soudé les fils derrière la télécommande et dans le boîtier de dérivation pour piloter les servomoteurs.
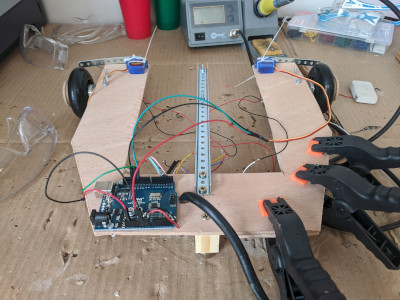
On a coupé les coins du robot principal pour réduire son périmètre à 120 cm. Malheureusement, il s’est cassé, on a dû le réparer avec un morceau de contre-plaqué.
On a fixé la carte Arduino sur le robot principal, et on a câblé les servomoteurs et les boutons de commande sur cette carte. Malheureusement, les pôle + et – semblent inversés… à rectifier !
Prochaine séance : rectifier la polarité de l’alimentation, faire fonctionner les barrières