Nom de l’équipe
On a choisi 5 propositions de la semaine dernière pour les soumettre au vote, une majorité assez nette se dégage pour Grebotik ! Allez Grebotik !!!
Apports techniques
On a abordé la programmation de la carte Arduino Uno : organisation de la carte, premiers pas avec mBlock, utilisation de la breadboard (plaquette d’expérimentation).
On n’a pas vu le temps passer… Du coup, le début de la conception du robot attendra la semaine prochaine.
Prochaine séance : découverte d’autres capteurs et actionneurs autour de l’Arduino
Oups !

Tout le monde était bien prévenu : quand vous êtes pris en « flag » à jouer ou faire n’importe quoi pendant la séance, vous avez droit à votre photo sur le blog. Cette semaine, Neil nous présente Krunker, un jeu en ligne qu’il affectionne particulièrement (hélas) !
Prochaine séance : aucune activité qui nous parasite la séance ?…
Le robot autonome
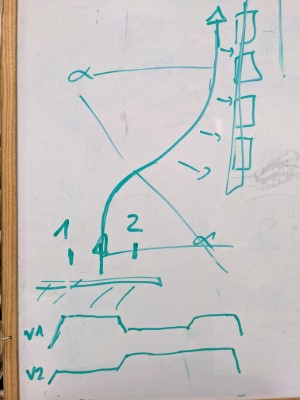
Ben et Maxime sont venus cette semaine au local pour prendre contact avec le matériel proposé. En premier lieu, il s’agit de piloter les moteurs de leur futur robot. A l’aide de la bibliothèque Arduino « Accelstepper » et de la carte de pilotage DRV8825, ils ont fait leurs premiers tours de moteurs pas à pas, avec accélération / plateau en vitesse max / décélération.
On a commencé à parler de la forme des trajectoires : avec 2 roues parallèles, on obtient des arcs de cercle dont la distance au centre dépend de la différence de vitesse entre les moteurs.
Prochaine séance : piloter 2 moteurs en même temps, à des vitesses différentes
