Manipulation des échantillons
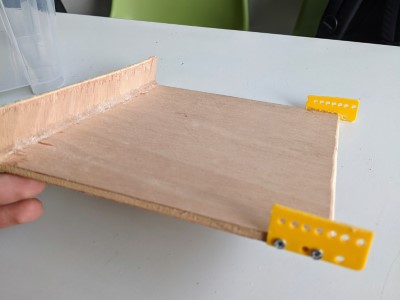
On part sur l’idée d’une sorte de pelle pour ramasser et retourner les échantillons. Un prototype est en cours de réalisation.
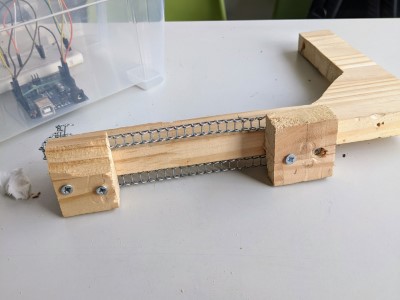
Mesure des résistances
On a commencé à modéliser le bras qui porte les contacteurs.
Statuette
On a commencé à modéliser une statuette inspirée des guerriers Moaï.
Robot autonome
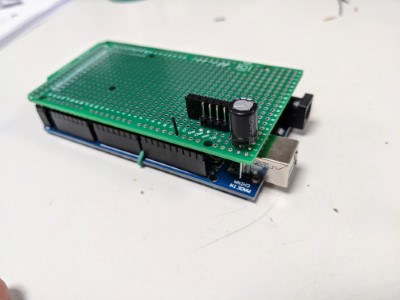
On a commencé à souder la carte shield de l’Arduino qui va porter l’électronique additionnelle (en premier lieu les cartes pilotes des moteurs pas à pas).
On a également commencé à regarder comment piloter les capteurs de distance « ToF ».
