Manipulation des échantillons
On a mis à jour le dessin de la pelle pour lui permettre de glisser de haut en bas.
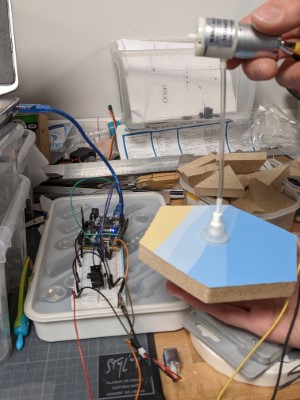
On a câblé des MOSFET pour piloter la pompe et l’électrovanne, on a testé la ventouse : ça fonctionne bien avec le vinyle sur les échantillons, l’électrovanne ne semble pas requise pour lâcher.
Structure du robot

On a commencé à fabriquer la structure du robot.
Robot autonome
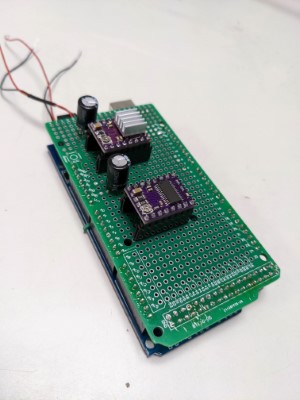
On a résolu les problèmes de pilotage du moteur pas-à-pas (côté logiciel), on a soudé la deuxième carte de pilotage de moteurs.
