Propulsion
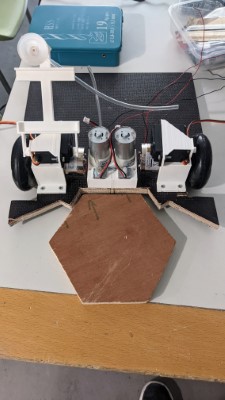
On a découpé l’avant du robot principal et on a câblé les moteurs.
Manipulation des échantillons
On a installé les pompes et les électrovannes entre les moteurs.
Affichage du score

On a expérimenté avec un potentiomètre pour contrôler l’affichage du score sur l’écran LCD. On a dessiné un boitier pour installer l’écran.
Robot autonome
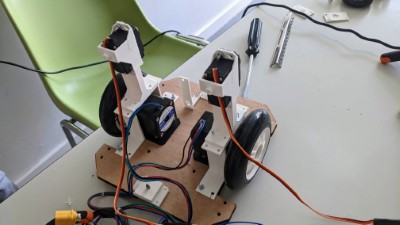
On a réinstallé les servomoteurs au-dessus des roues.
Toujours bloqués pour interroger plusieurs capteurs laser, on s’est concentré sur le partage des tâches entre les Arduino et leur communication via le bus I2C.
