Propulsion

On a fabriqué 2 boucliers pour empêcher les échantillons de se glisser sous le robot. On a fabriqué un support pour fixer l’arrivée du câble de la télécommande.
Manipulation des échantillons
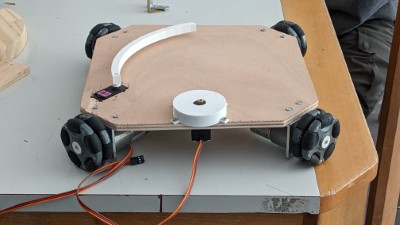
On a installé la tourelle du bras à l’avant et le servomoteur d’éjection.
Télécommande
On a défini les boutons à installer sur la télécommande pour simplifier le pilotage par rapport à l’ancienne télécommande.
