Propulsion

On a installé le « pont » au-dessus du robot (le câble de la télécommande viendra se fixer au sommet). On a également installé les boucliers avant et arrière entre les roues.
Télécommande
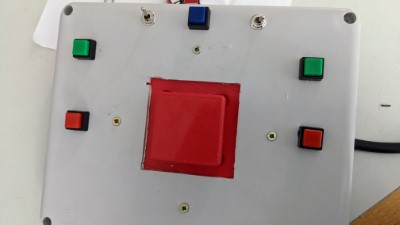
On a installé 5 poussoirs et 2 interrupteurs à levier sur la télécommande. On a commencé à les câbler.
