On a installé le second actionneur pour les manches à air, on a câblé les deux boutons du dessus de la télécommande. On a dessiné l’actionneur pour les pavillons : le support du servomoteur et le bras.
Prochaine séance : installer les pavillons, effectuer les « réglages » dans le programme Arduino
Phare
On a collé le boulon de fixation.
Prochaine séance : debugger le chenillard
Poster
On a commencé le poster.
Prochaine séance : terminer !
Echauffement
On a commencé l’échauffement physique pour la compétition du 9 juin (?!).
On a déplacé l’Arduino et installé le second actionneur pour les manches à air.
Prochaine séance : installer le second bras d’actionneur pour les manches à air, attacher les fils, installer les barrières
Phare
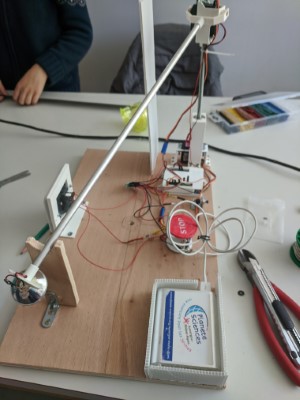
On a fabriqué un casier pour placer la batterie, on a installé un poussoir d’arrêt d’urgence et une charge résistive pour garder la « power bank » allumée lorsque le phare est éteint. On a testé le phare mais la consommation semble trop élevée pour cette batterie, la solution serait peut-être de remplacer l’ampoule du phare par une LED.
Prochaine séance : installer une LED blanche au sommet du phare et tester, attacher les fils
Poster
On a avancé sur le poster
Prochaine séance : ajouter les photos du robot et du phare (terminés)
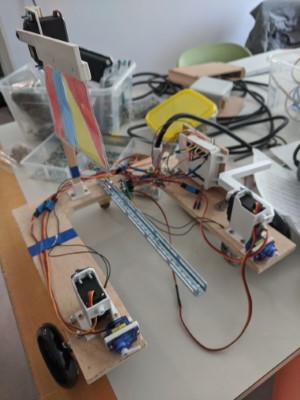
On a câblé 2 boutons supplémentaires sur la télécommande et soudé des fils de commande vers l’Arduino, on scotché des fils sur le robot. On a testé l’actionneur des manches à air (et refixé une roue !). On a décidé comment on allait positionner les pavillons.
Prochaine séance : terminer le robot ! ^_^’
Poster
On a commencé le poster.
Desserte
On a commencé à aménager une desserte pour transporter tout notre matériel lors de la compétition.
On a terminé de câbler l’Arduino, on a commencé à ranger les câbles. On a testé l’actionneur pour les manches à air : problème, on ne pas reculer suffisamment pour glisser l’actionneur.
Prochaine séance : régler le problème de l’actionneur pour les manches à air, terminer de ranger les câbles, tester le robot complet
Phare
On a ajouté et câblé un bouton poussoir. On a ajouté un panneau plastique pour masquer la base.
Prochaine séance : modifier le programme Arduino pour replier le phare lorsque le bouton est pressé
Poster
On a commencé à dessiner le poster de présentation de notre projet. On a fait une photo de groupe en extérieur.
Desserte
On a commencé à aménager une desserte pour déplacer tout notre matériel lors de la compétition.
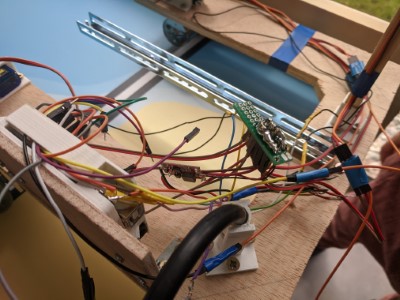
On a soudé des fils d’alimentation supplémentaires et on a câblé des fils de commandes sur l’Arduino.
Prochaine séance : terminer le câblage de l’Arduino et tester le robot
Phare
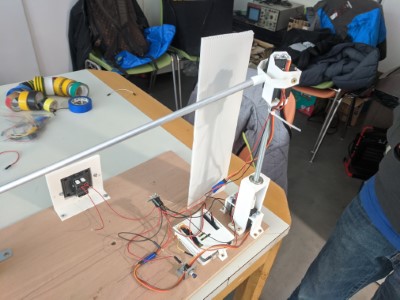
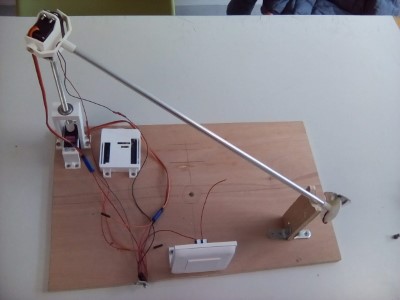
On a affiné le programme de l’Arduino et monté une ampoule : le phare se dresse ! Mais on est obligé de forcer sur la mécanique pour le replier, ce qui dérègle les angles (ça se voit déjà sur l’animation ci-contre)
Prochaine séance : ajouter un bouton et une fonctionnalité dans le programme Arduino pour replier le phare, décider comment on l’alimente (sur batterie ou branché sur l’alimentation 12V du robot)
Notre première compétition de l’année est confirmée : il s’agit du Challenge Robotique Université Grenoble Alpes qui, pour des raisons sanitaires, se déroulera sans public et sera fractionné sur plusieurs jours par poules de 4 équipes. La compétition prendra place dans un bâtiment du campus universitaire de Saint-Martin-d’Hères. Notre poule se réunira mercredi 9 juin toute la journée. Je vous fournirai bientôt les détails de l’organisation : lieu exact, horaires. On sait toutefois qu’il faudra prévoir un panier repas et que celui-ci devra être pris à l’extérieur.
Ca fait du bien d’avoir à nouveau un objectif précis : il reste 4 séances après la séance d’aujourd’hui… et encore pas mal de choses à terminer et tester ! ^_^
Les 4 équipes convoquées mercredi 9 juin sont :
Grobot A -> les 9-11 ans du mercredi matin
Grobot B -> nous !
Catalin 1 -> probablement l’équipe du lycée Les Catalins de Montélimar
Team Vinci -> probablement l’équipe du lycée Léonard de Vinci de Villefontaine
C’est un peu impressionnant d’envisager des matchs contre des lycéens qui ont travaillé sur leur robot dans le cadre de leurs cours, mais ce sera peut-être l’occasion de voir de belles mécaniques dont nous pourrions nous inspirer une prochaine fois (pour la base roulante notamment).
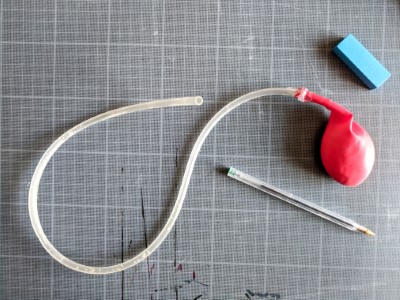
A part ça, Laurent nous a fait une petite démonstration d’un actionneur qui utilise une sorte de « changement de phase » (liquide / solide) dans un milieu granulaire pour saisir de petits objets de toutes formes : une description bien compliquée pour quelques grains de semoules placés dans un ballon de baudruche duquel on aspire l’air pour figer sa forme -> petite vidéo de démonstration
Robot principal
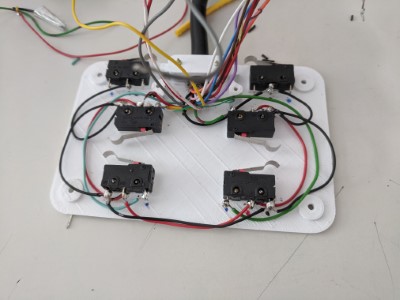
On a (tout juste) commencé à câbler la nouvelle télécommande.
Prochaine séance : câbler la télécommande, tester le nouvel actionneur pour les manches à air
Phare
On a commencé à debugger le programme du phare : le servomoteur et les LEDs ont un comportement aléatoire par moments…
Nous avons quelques précisions à propos de nos adversaires au Challenge robotique de l’Université Grenoble Alpes. Mercredi 9 juin, 4 équipes sont convoquées :
Grobot A -> nous !
Grobot B -> les 11-15 ans du mercredi après-midi
Catalin 1 -> probablement l’équipe du lycée Les Catalins de Montélimar
Team Vinci -> probablement l’équipe du lycée Léonard de Vinci de Villefontaine
C’est un peu impressionnant d’envisager des matchs contre des « grands », mais ce sera peut-être l’occasion de voir de belles mécaniques dont nous pourrions nous inspirer une prochaine fois (pour la base roulante notamment).
A part ça, Laurent nous a fait une petite démonstration d’un actionneur qui utilise une sorte de « changement de phase » (liquide / solide) dans un milieu granulaire pour saisir de petits objets de toutes formes : une description bien compliquée pour quelques grains de semoules placés dans un ballon de baudruche duquel on aspire l’air pour figer sa forme -> petite vidéo de démonstration
Robot principal
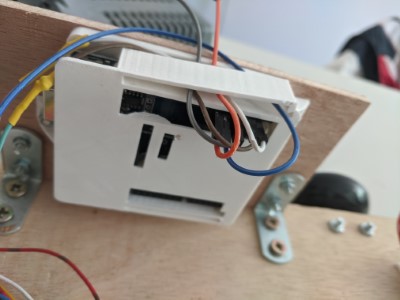
On a installé l’actionneur des manches à air sur le côté droit du robot. On a modifié le programme pour activer les « pull up » sur les entrées et on l’a téléversé sur l’Arduino. On a remis le couvercle sur la télécommande.
Prochaine séance : souder des câbles d’alimentation pour les nouveaux servomoteurs, câbler l’Arduino
Phare
On a modifié et téléversé le programme sur l’Arduino et on a commencé les tests.
Notre première compétition de l’année est confirmée : il s’agit du Challenge Robotique Université Grenoble Alpes qui, pour des raisons sanitaires, se déroulera sans public et sera fractionné sur plusieurs jours par poules de 4 équipes. La compétition prendra place dans un bâtiment du campus universitaire de Saint-Martin-d’Hères. Notre poule se réunira mercredi 9 juin toute la journée. Je vous fournirai bientôt les détails de l’organisation : lieu exact, horaires. On sait toutefois qu’il faudra prévoir un panier repas et que celui-ci devra être pris à l’extérieur.
Ca fait du bien d’avoir à nouveau un objectif précis : il reste 5 séances après la séance d’aujourd’hui… et encore pas mal de choses à terminer et tester ! ^_^
Prochaine séance : tester le programme Arduino (sur le PC avec une marque verte), installer et tester un actionneur manches à air
Phare
On a soudé les fils d’alimentation des servomoteurs et de l’éclairage. On a fabriqué et installé un support pour l’extrémité du phare lorsqu’il est replié.
Prochaine séance : souder un fil de masse et tester le programme Arduino
On a ajouté de quoi alimenter les servomoteurs pour les manches à air et pour les pavillons. On a mis à jour le design de l’actionneur pour les manches à air (suites aux essais de la semaine dernière).
Prochaine séance : tester le nouvel actionneur pour les manches à air
Télécommande
On change de designer (dur dur…).
Phare
On a continué à debugger le programme du phare : faux-contact trouvé sur la masse.