Après un premier confinement qui a brutalement mis fin à la saison 2019-2020 juste avant la compétition régionale du 21 mars, le club robotique a repris fin septembre pour la saison 2020-2021.
Trois séances se sont déroulées avant les vacances de la Toussaint : les deux premières nous ont permis de voir ou revoir des notions importantes d’électricité, la troisième nous a permis d’entrevoir la programmation de la carte Arduino avec le logiciel mBlock.
Hélas, un second confinement nous a imposé de suspendre les séances de début novembre à la mi-décembre. Cette séance du 16 décembre sonne donc nos retrouvailles, avec un délai très court pour préparer la compétition régionale maintenue (jusqu’à nouvel ordre) au samedi 20 février 2021 à Vaulx-en-Velin : en janvier il ne restera que 5 séances pour modifier, tester et apprendre à piloter les robots commencés la saison précédente.
Règlement
Nous avons vu (ou revu pour les « anciens ») le règlement de la compétition au travers de quelques diapos. Quelques modifications mineures ont été effectuées depuis l’an dernier.
Après avoir détaillé les réalisations de l’an dernier (les robots, le phare…), nous avons fait le bilan du nombre de points qu’il était envisageable de marquer :
Action
Nombre de points
Chenaux (en supposant la collecte de 3 bouées de chaque couleur)
18 points (ou plus avec des bouées supplémentaires)
Manches à air
15 points
Phare
15 points
Arrivée à bon port
20 points
Pavillons
10 points
Total
78 points (ou plus)
Nombre de points marqués en supposant que « tout se passe bien »
On note que la collecte des bouées et la construction de chenaux est une tâche qui rapporte peu de points relativement à l’effort qu’elle demande, cette action devrait être vue comme une sorte de « bonus ».
Modifications et améliorations envisagées
Les éléments construits la saison dernière étaient assez loin d’être fonctionnels pour la compétition. Toutefois, ils ont permis d’explorer des idées et serviront de base au travail de cette saison.
Par ailleurs, de nombreuses photos et vidéos des robots réalisés par d’autres équipes sont maintenant disponibles sur Internet, notamment les équipes de la Coupe de robotique (c’est le même règlement que pour nos Trophées excepté que les robots sont entièrement autonomes sur la table de jeu !) : par exemple, les messages des équipes présentes sur Twitter sont collectés sur cette liste et la retransmission de la Coupe de France robotique est disponible sur la chaîne YouTube de Planète Sciences. Il est donc possible de s’en inspirer pour nos réalisations.
Enfin, l’impression 3D est envisagée pour réaliser des pièces de précision. Pour modéliser les pièces (c’est à dire les dessiner en volume), le logiciel en ligne TinkerCAD sera utilisé, il est gratuit et assez intuitif dans son fonctionnement. Un seul membre de l’équipe connait un peu ce domaine, mais avec un autre logiciel de modélisation. Il serrait être utile d’avoir plusieurs membres de l’équipe capables de faire de la modélisation. Quelques courtes vidéos produites par la fablab de la Cité des Sciences et de l’Industrie permettent de se lancer en autonomie : partie 1, partie 2, partie 3, partie 4. -> Lilian et Neil se sont portés volontaires pour ces tâches (ce qui n’empêche en rien d’autres jeunes de s’initier à cette technique !)
Tout ceci étant pris en compte, voici les réalisations planifiées pour les prochaines séances :
1. Robot principal
Pour le robot principal, l’idée est de garder le même principe mais de corriger quelques problèmes identifiés :
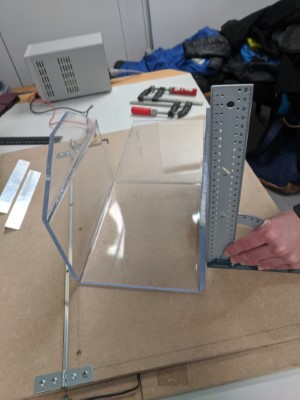
Structure en plexi épais (lourde) :
monter les moteurs sur la structure et tester sa vitesse -> Maxime et Ben
pour alléger la structure, des surfaces inutiles pourraient être supprimées
Actionneur pour les manches à air : déterminer quel mécanisme serait efficace pour assurer le basculement des manches à air -> Ibrahim
Pavillons : voir si le mécanisme pour hisser les pavillons peut être lié ou non à celui des manches à air
2. Télécommande
La construction de la télécommande était peu avancée, il va falloir la compléter pour piloter toutes les fonctionnalités du robot. -> Samuel
3. Phare
La solution envisagée l’an dernier semble relativement dangereuse et pourrait être refusée lors de la phase de qualification. Une solution plus simple, inspirée par un design vu chez une équipe de la Coupe de robotique, est envisagée : un mat en deux parties (la deuxième étant la plus légère possible pour faciliter sa mise à la verticale) avec un bandeau LEDs au sommet pour simuler le balayage sans pièce mobile (ce qui évite d’emmêler les fils ou d’avoir une seconde source d’énergie pour l’éclairage). -> Qâcim et Nathan
4. Robot secondaire
Trop léger pour permette de basculer les manches à air, le robot secondaire construit l’an dernier en Lego Mindstorm est mis de côté pour le moment.
Après un premier confinement qui a brutalement mis fin à la saison 2019-2020 juste avant la compétition régionale du 21 mars, le club robotique a repris fin septembre pour la saison 2020-2021.
Trois séances se sont déroulées avant les vacances de la Toussaint : les deux premières nous ont permis de voir ou revoir des notions importantes d’électricité, la troisième nous a permis d’entrevoir la programmation de la carte Arduino avec le logiciel mBlock.
Hélas, un second confinement nous a imposé de suspendre les séances de début novembre à la mi-décembre. Cette séance du 16 décembre sonne donc nos retrouvailles, avec un délai très court pour préparer la compétition régionale maintenue (jusqu’à nouvel ordre) au samedi 20 février 2021 à Vaulx-en-Velin : en janvier il ne restera que 5 séances pour modifier, tester et apprendre à piloter les robots commencés la saison précédente.
Règlement
Nous avons vu (ou revu pour les « anciens ») le règlement de la compétition au travers de quelques diapos. Quelques modifications mineures ont été effectuées depuis l’an dernier.
Après avoir détaillé les réalisations de l’an dernier (le robot, le phare…), nous avons fait le bilan du nombre de points qu’il était envisageable de marquer :
Action
Nombre de points
Chenaux (en supposant la collecte de 3 bouées de chaque couleur)
18 points (ou plus avec des bouées supplémentaires)
Manches à air
15 points
Phare
15 points
Arrivée à bon port
20 points
Pavillons
10 points
Total
78 points (ou plus)
Nombre de points marqués en supposant que « tout se passe bien »
On note que la collecte des bouées et la construction de chenaux est une tâche qui rapporte peu de points relativement à l’effort qu’elle demande, cette action devrait être vue comme une sorte de « bonus ».
Modifications et améliorations envisagées
Les éléments construits la saison dernière étaient assez loin d’être fonctionnels pour la compétition. Toutefois, ils ont permis d’explorer des idées et serviront de base au travail de cette saison.
Par ailleurs, de nombreuses photos et vidéos des robots réalisés par d’autres équipes sont maintenant disponibles sur Internet, notamment les équipes de la Coupe de robotique (c’est le même règlement que pour nos Trophées excepté que les robots sont entièrement autonomes sur la table de jeu !) : par exemple, les messages des équipes présentes sur Twitter sont collectés sur cette liste et la retransmission de la Coupe de France robotique est disponible sur la chaîne YouTube de Planète Sciences. Il est donc possible de s’en inspirer pour nos réalisations.
Enfin, l’impression 3D est envisagée pour réaliser des pièces de précision. Pour modéliser les pièces (c’est à dire les dessiner en volume), le logiciel en ligne TinkerCAD sera utilisé, il est gratuit et assez intuitif dans son fonctionnement. Un seul membre de l’équipe connait ce logiciel de modélisation, il serrait être utile d’avoir d’autres membres de l’équipe capables de faire de la modélisation. Quelques courtes vidéos produites par la fablab de la Cité des Sciences et de l’Industrie permettent de se lancer en autonomie : partie 1, partie 2, partie 3, partie 4.
Tout ceci étant pris en compte, voici les réalisations planifiées pour les prochaines séances :
1. Robot principal
Pour le robot principal, l’idée est de garder le même principe mais de corriger quelques problèmes identifiés :
Remplacer la plateforme avec une planche plus rigide
Remplacer les moyeux pour gagner en largeur
Tester le bras supposé basculer les manches à air, modifier le mécanisme si besoin
2. Télécommande
La télécommande ne devrait pas être beaucoup modifiée. Un interrupteur doit être ajouté pour hisser les pavillons.
3. Phare
Très esthétique, la solution envisagée l’an dernier semble fragile et difficile à faire fonctionner. Une solution plus simple, inspirée par un design vu chez une équipe de la Coupe de robotique, est envisagée : un mat en deux parties (la deuxième étant la plus légère possible pour faciliter sa mise à la verticale) avec un moteur placé sur la base pour effectuer un balayage sur 180° (ce qui évite d’emmêler les fils qui iront au moteur de l’articulation et à l’éclairage sommital).
Liste établie 2 séances avant la compétition à Vaulx-en-Velin (début mars), à compléter… Dernière mise à jour : le 11 mars après la séance.
Robot principal
câbler l’interrupteur pour piloter les bras (pour redresser les manches à air) depuis la télécommande
fixer la plaque sous la télécommande
installer le servomoteur pour le bras gauche
installer les bras sur les servomoteurs
installer le mât, les pavillons et leur servomoteur
refaire et fixer la plaque de protection de l’Arduino
fixer les câbles
ajouter un affichage du score prévu
vérifier les points d’homologation : dimensions, périmètre, zone pour les autocollants, etc.
tester le bon fonctionnement de tous les servomoteurs
tester le robot sur table :
collecte des bouées et création des chenaux
relevage des manches à air
hissage des pavillons
déclenchement du phare
travailler l’esthétique du robot
Phare
fixer le premier étage sur la plaque
caler les deuxième et troisième étages (pour éviter leur blocage au démarrage)
installer le système lumineux sur le troisième étage (attention à la hauteur max.)
installer le système d’enroulement du ruban
ajouter l’interrupteur de déclenchement
choisir et tester l’alimentation électrique du moteur d’enroulement
câbler
tester le déploiement
caler les butées pour limiter les oscillations pendant le déploiement
vérifier les points d’homologation : dimensions, hauteur avant et après déploiement, etc.
travailler l’esthétique du phare
Stratégie & organisation de l’équipe
essayer quelques parcours avec le robot en 100 secondes et déterminer celui qui semble le plus efficace
estimer le nombre de points marqués, le noter sur le robot principal
définir comment on se rend compte qu’on entre dans les 5 dernières secondes pour effectuer les actions finales : hissage des pavillons et retour au port côté Nord ou Sud (selon la position de la boussole)
établir des règles pour savoir qui tient les rôles de pilote et copilote, les faire valider par tous
s’entraîner autant que possible (!) et affiner le score prévu
Laurent : rappeler le déroulement des matchs, le principe de fair play, passer les consignes de présence sur les stands, etc.
Laurent : commander les t-shirts aux couleurs de l’équipe
Chariot & accessoires
resserrer les vis du chariot
le personnaliser pour le différencier de celui de l’autre équipe
fixer le câble sur la perche
déterminer comment installer le matériel dessus
tester l’installation en temps limité, puis le rangement
Poster & présentation
[Laurent] collecter les tailles de t-shirts
[Laurent] commander les t-shirts aux couleurs de l’équipe
rédiger les textes
photos des membres de l’équipe : trombinoscope individuel ou photo de groupe ?
choisir la couleur du panneau plastique
prévoir une décoration du stand (panneau « robot » de 2018 ? dessins ? affiches ?)
[fin de séance du 18 mars] prendre des photos du robot et du phare (sur fond blanc)
[Laurent, 19-20 mars] imprimer les photos
[à l’arrivée à Vaulx] assemblage des textes et photos sur le panneau
Liste établie 2 séances avant la compétition à Vaulx-en-Velin (début mars), probablement incomplète… Dernière mise à jour : le 11 mars après la séance.
Robot principal
terminer le châssis en Plexiglass
assembler une seconde roue
ajouter les moteurs et les roues
recouper l’arrière du châssis et ajouter la « roue folle »
installer les barrières
installer les bras pour redresser les manches à air
terminer le bras pour saisir les bouées échouées
installer le bras de saisie des bouées
fabriquer les pavillons
installer les pavillons avec leur système de hissage
fixer les câbles
ajouter un affichage du score prévu
vérifier les points d’homologation : dimensions, périmètre, zone pour les autocollants, etc.
tester le bon fonctionnement de tous les servomoteurs
tester le robot sur table :
collecte des bouées et création des chenaux
relevage des manches à air
hissage des pavillons
déclenchement du phare
travailler l’esthétique du robot
Robot secondaire
essayer de redresser les manches à air (alourdir le robot ?)
coder un parcours pour un départ à gauche ou à droite, ne pas oublier le démarrage par carte et l’évitement du robot adverse
prévoir un emplacement pour l’autocollant d’homologation (10×7 cm²)
fixer les câbles
vérifier les points d’homologation : dimensions, périmètre, zone pour les autocollants, évitement des collisions, etc.
tester le robot sur table
travailler l’esthétique du robot
Phare
installer la pile et le système de déclenchement
tester le déploiement
vérifier les points d’homologation : dimensions, hauteur avant et après déploiement, etc.
travailler l’esthétique du phare
Stratégie & organisation de l’équipe
essayer quelques parcours avec le robot en 100 secondes et déterminer celui qui semble le plus efficace
estimer le nombre de points marqués, le noter sur le robot principal
définir comment on se rend compte qu’on entre dans les 5 dernières secondes pour effectuer les actions finales : hissage des pavillons et retour au port côté Nord ou Sud (selon la position de la boussole)
établir des règles pour savoir qui tient les rôles de pilote et copilote, les faire valider par tous
s’entraîner autant que possible (!) et affiner le score prévu
Laurent : rappeler le déroulement des matchs, le principe de fair play, passer les consignes de présence sur les stands, etc.
Laurent : commander les t-shirts aux couleurs de l’équipe
Chariot & accessoires
resserrer les vis du chariot
le personnaliser pour le différencier de celui de l’autre équipe
fixer le câble sur la perche
déterminer comment installer le matériel dessus
tester l’installation en temps limité, puis le rangement
Poster
rédiger les textes
photos des membres de l’équipe : trombinoscope individuel ou photo de groupe ?
choisir la couleur du panneau plastique
prévoir une décoration du stand (panneau « robot » de 2018 ? dessins ? affiches ?)
[fin de séance du 18 mars] prendre des photos du robot et du phare (sur fond blanc)
[Laurent, 19-20 mars] imprimer les photos
[à l’arrivée à Vaulx] assemblage des textes et photos sur le panneau
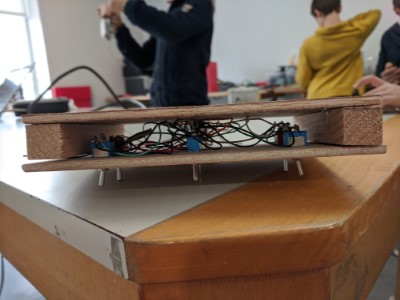
On a ajouté un interrupteur sur la télécommande pour sortir les bras pour les manches à air. On a préparé une plaque de fond pour protéger les fils sous la télécommande.
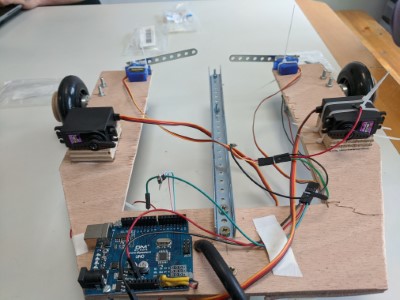
On a fixé un servomoteur sur le chassis pour le bras de droite qui permettra de redresser les manches à air, et on a commencé à faire la même chose à gauche.
On a modifié le code de l’Arduino pour piloter les servomoteurs du pavillon et des bras pour les manches à air.
Prochaine séance : souder le nouvel interrupteur de la télécommande, fixer la plaque sous la télécommande, refaire la plaque de protection de l’Arduino, installer le servomoteur pour le bras de gauche.
Phare
On a préparé la fixation du phare sur le support.
On a assemblé le moteur et la partie lumineuse.
Prochaine séance : fixer le premier étage du phare sur le plaque de support, fixer la partie lumineuse sur le troisième étage du phare