Quelques photos…







Séance du 12 février – Grobot B
Robot principal
On a commencé à rectifier le câblage à de la télécommande (arrivée de l’alimentation).
On a commencé à programmer le pilotage de la pince avec l’Arduino.
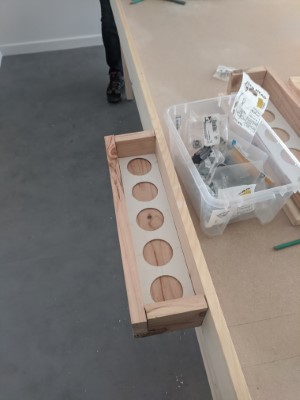
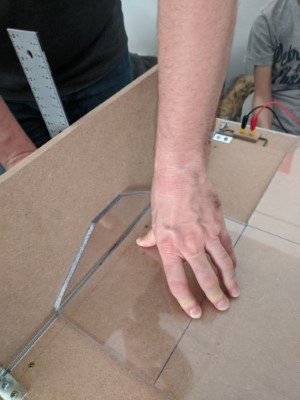
On a coupé le Plexiglass, et réalisé un premier pli.
Prochaine séance : terminer le programme de îlotage de la pince, terminer le pliage du chassis, continuer le bras, câbler tout ça
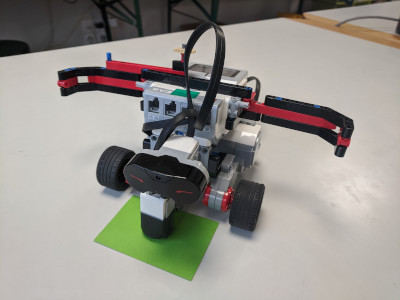
Robot secondaire
On a modifié le robot (capteur de ligne retiré), et on a commencé à réaliser le parcours pour relever les manches à air.
Prochaine séance : remettre le capteur d’obstacles, terminer le parcours et faire un système de tirette.
Phare
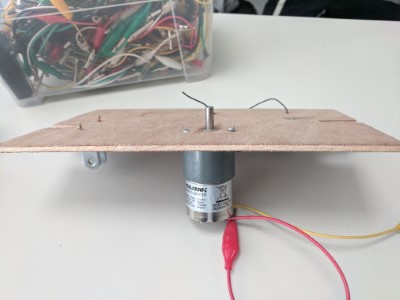
On a mies la plaque tournante, on ajouté une ampoule et des piles, on a commencé à câbler le moteur.
Prochaine séance : terminer le phare (!)
Séance du 12 février – Grobot A
Robot principal
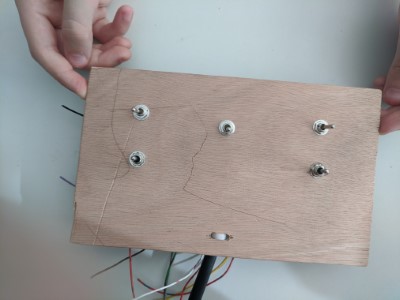
On a ajouté un interrupteur à la télécommande, et câblé le fil dans la boîte de connexions.
On a fixé les fils sur le robot.
Prochaine séance : fixer le pavillon,le piloter depuis la télécommande, protéger l’Arduino
Phare
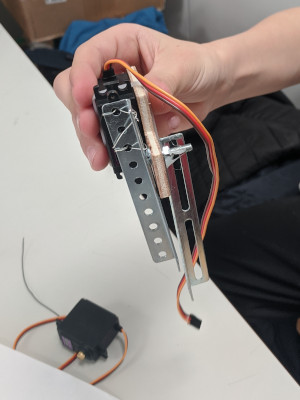
On a élargi les fentes et ajouté des barres métalliques pour diminuer les frottements. En tirant sur le ruban à la main, le déploiement fonctionne avec les 3 étages !


On a continué la partie lumineuse.
Prochaine séance : fixer le phare sur la base, terminer la partie lumineuse, ajuster les butées
Séance du 5 février – Grobot B
Robot principal
On a continué à câbler la télécommande.
On a dessiné le plan de découpe sur le Plexiglass.
On a commencé à créer la pince pour saisir les « bouées échouées » (les gobelets à l’extérieur du plateau de jeu).
Prochaine séance : continuer à câbler de la télécommande jusqu’au robot, découper et plier le Plexiglass, créer la deuxième articulation de la pince.
Robot secondaire
Le suiveur de ligne ne fonctionne toujours pas, nous envisageons de ne pas l’utiliser. Nous avons également remplacé un moteur qui semblait défectueux.
Prochaine séance : essais de parcours global sans suivi de ligne
Phare
Nous avons remplacé le moteur (problème mécanique sur l’autre).
Prochaine séance : fixer une plaque tournante, y fixer la lumière.
Séance du 5 février – Grobot A
Robot principal
On a inversé les polarités de l’alimentation et des moteurs. Il y avait des court-circuits, donc on a isolé des fils sur le robot et derrière la télécommande.
On a essayé de programmer la carte Arduino, mais ça ne fonctionnait pas : elle a peut-être « grillé » la semaine dernière par l’inversion de polarités. On a donc installé une carte Arduino neuve, et ça a fonctionné : les barrières sont bien pilotées depuis la télécommande ! 🙂

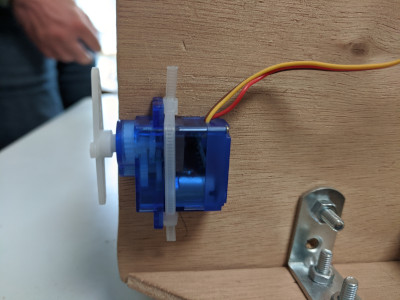
On a commencé à faire les pavillons, en les hissant avec un gros servomoteur.
Prochaine séance : régler la position des barrières, fixer les fils, fixer le mat du pavillon, le piloter depuis la télécommande, habiller l’arrière de la télécommande
Le phare

On a terminé le troisième étage. On a percé des fentes dans le premier et le deuxième étage : en tirant le ruban, le deuxième étage s’élève comme prévu, mais c’est un peu dur. On a commencé à refaire la partie lumineuse tournante.
Prochaine séance : terminer les fentes en plaçant des barres métalliques pour diminuer les frottements, continuer la construction de la partie lumineuse, trouver comment fixer la partie lumineuse au-dessus du phare.
Séance du 29 janvier – Grobot B
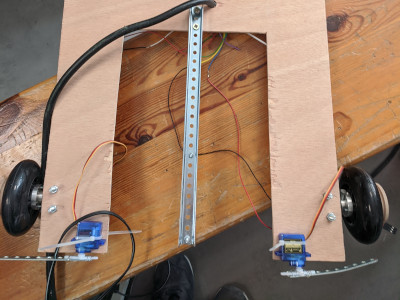
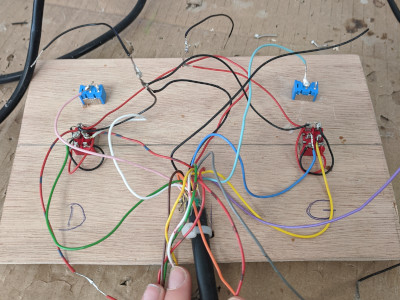
Robot principal
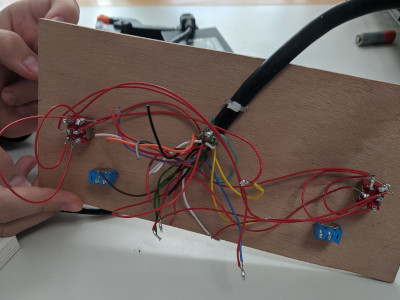
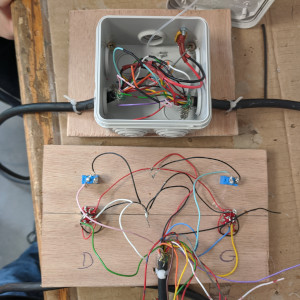
Derrière la télécommande, on a soudé les interrupteurs pour contrôler le déplacement du robot.
On a commencé à souder les fils dans la boîte de dérivation.
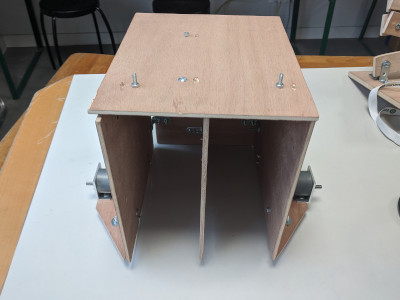
On a fixé les servomoteurs pour les barrières.
On a fait un essai pour plier du Plexiglass : les longueurs intérieures au pli sont conservées.
Prochaine séance : fixer les barrières, fixer les roues folles
Robot secondaire
Nous avons essayé d’améliorer le suiveur de ligne, avec un succès plus que mitigé (plus rien ne fonctionne).
L’arrêt d’urgence tient beaucoup mieux maintenant.
Prochaine séance : revenir à un suiveur de ligne fonctionnel, progresser vers un parcours global
Phare

On a augmenté la tension du ressort pour supporter le poids de la plateforme.
On a ajouté un système de déclenchement.
On a commencé à fixer les piles à la plateforme.
Prochaine séance : continuer la plateforme, créer le système de déclenchement
Achats / à faire pendant la semaine
- Plexiglass
- Imprimer un exemplaire du règlement
Séance du 29 janvier – Grobot A
Phare
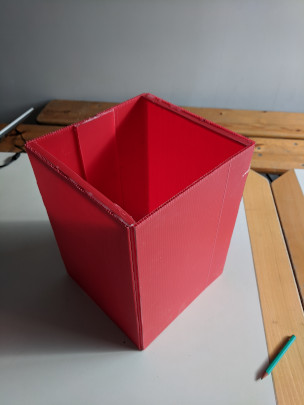
On a ajouté les butées sur le deuxième étage, et on a commencé le troisième étage en plastique rouge.
Prochaine séance : ajouter les butées sur le troisième étage, faire les fentes et tester avec le ruban
Robot principal
On a soudé les fils derrière la télécommande et dans le boîtier de dérivation pour piloter les servomoteurs.
On a coupé les coins du robot principal pour réduire son périmètre à 120 cm. Malheureusement, il s’est cassé, on a dû le réparer avec un morceau de contre-plaqué.
On a fixé la carte Arduino sur le robot principal, et on a câblé les servomoteurs et les boutons de commande sur cette carte. Malheureusement, les pôle + et – semblent inversés… à rectifier !
Prochaine séance : rectifier la polarité de l’alimentation, faire fonctionner les barrières
Séance du 22 janvier – Grobot B
Robot principal
On a commencé la télécommande, avec les boutons pour se déplacer et contrôler les barrières.
On a terminé la structure du robot, et on a réfléchi à la forme de la pince.

Robot secondaire
On a ajouté un arrêt d’urgence. On a codé une solution d’évitement des obstacles. On a codé la séquence de départ du port.
Et on a fait une bataille de pneus.
Phare
On a modifié la fixation de la plateforme, on a ajouté un moteur pour faire tourner la lumière du phare

Prochaine séance :
robot principal : souder les fils derrière la télécommande, fixer les barrières, évaluer la faisabilité de la structure en plexy, commencer la pince
robot secondaire : ajout de la tirette pour démarrer, trajectoire complète
phare : ajout de la plateforme tournante avec la lumière, ajout d’un mécanisme de déclenchement
Séance du 22 janvier – Grobot A
Phare
On a fait le deuxième étage du phare en plastique blanc. On a fait une première fente dans le premier étage pour passer le ruban.
Prochaine séance : faire les autres fentes sur le premier et le deuxième étage + fabriquer le troisième étage en plastique rouge.
Robot principal
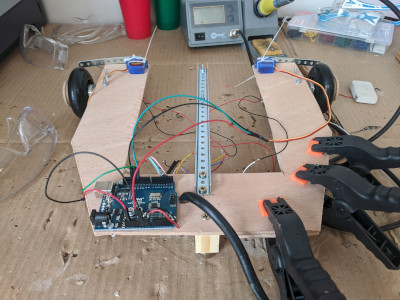
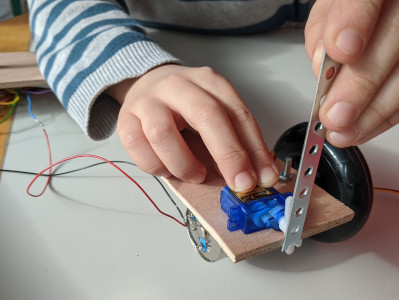
On a fixé la séparation des gobelets rouges et verts, puis ajouté la « roue folle ». On a fixé les barrières aux servomoteurs, et les servomoteurs sur la base du robot.
Sur la télécommande, on a commencé à installer les interrupteurs pour contrôler les barrières.
On a commencé le code pour piloter les servomoteurs avec l’Arduino : broches 2 et 3 pour les entrées interrupteurs, broches 12 et 13 pour les sorties servomoteurs.
Prochaine séance : terminer de souder les interrupteurs de la télécommande, souder les fils dans la boîte de dérivation, installer la carte Arduino sur le robot, connecter les servomoteurs et les interrupteurs sur l’Arduino, terminer le programme pour piloter les servomoteurs, et tester le contrôle des barrières.
Séance du 15 janvier – Grobot A
Phare
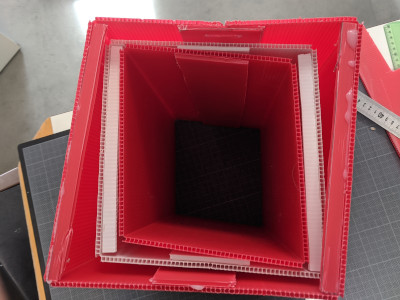
Changement d’approche pour la construction du phare : la version propulsée par des ressorts semblait dangereuse, et l’extrémité sortait du périmètre autorisé lors du déploiement.
Nous sommes partis sur un système inspiré des sabres laser Star Wars® en jouet plastique, dont les segments de la lame s’emboîtent les uns dans les autres.

Nous prévoyons 3 étages pour atteindre la bonne hauteur, chaque étage sera construit en plaque plastique pour être léger et rigide. Nous prévoyons de hisser les étages en tendant un ruban qui viendra s’enrouler sur un axe motorisé. Le système lumineux rotatif au sommet du phare sera conservé par rapport à la version précédente.
Le premier étage est construit en plastique rouge.
Prochaine séance : construction des deux autres étages (2ème étage en blanc, 3ème en rouge), test du mécanisme d’ascension par tension du ruban.
Robot principal

Nous avons fixé les câbles au niveau de la boîte de dérivation, et refermé.
Nous avons testé le robot avec la télécommande : après inversion des fils sur un des moteurs, le robot se déplace comme attendu. Super nouvelle ! 😀
Nous avons commencé à voir comment réaliser les barrières qui serviront à retenir les bouées dans le robot lors des marches arrières. Nous prévoyons d’utiliser de petites plaques métalliques prépercées montés sur des servomoteurs (des moteurs commandés en position via une carte Arduino).
Nous avons listé les prochaines tâches à réaliser sur le robot principal :
- ajout d’une séparation entre les bouées vertes et rouges (en cours)
- ajout des barrières (en cours)
- ajout d’une « roue folle » à l’arrière du robot
- ajout de « bras » pour redresser les manches à air
- ajout des pavillons (à hisser au-dessus de 35 cm lors des 5 dernières secondes du match)
Achats à prévoir
- Plaque plastique de couleur blanche (second étage du phare)
- Ruban solide et glissant pour déployer le phare, longueur minimale 2,50 mètres (à la louche : 2 fois 4 fois la hauteur + 1 fois la largeur = 2 x 4 x 28 + 20 = 244 cm)
