Une des autres actions que nous devons réaliser durant le concours est d’allumer un phare pour que les bateaux égarés puissent rentrer au port en toute sécurité. Ce phare doit être activité pendant la phase de jeu par un contact physique du robot. Et une fois allumé, il doit se déployer et allumer une source lumineuse avec balayage pour signaler la zone rocheuse.
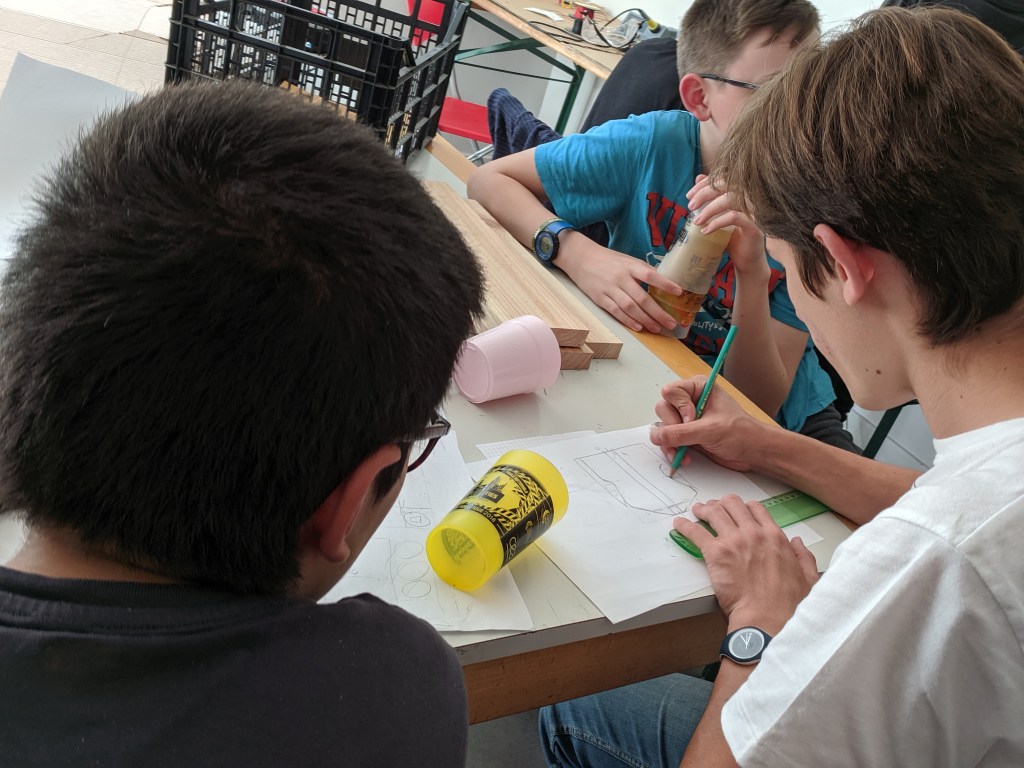
Aujourd’hui, une partie de notre équipe à travailler sur cette problématique. Nous avons eu l’idée d’un phare équipé d’un petit moteur qui permettrait à un cache de tourner autour de la lumière pour créer l’illusion du balayage.
(insertion vidéo)
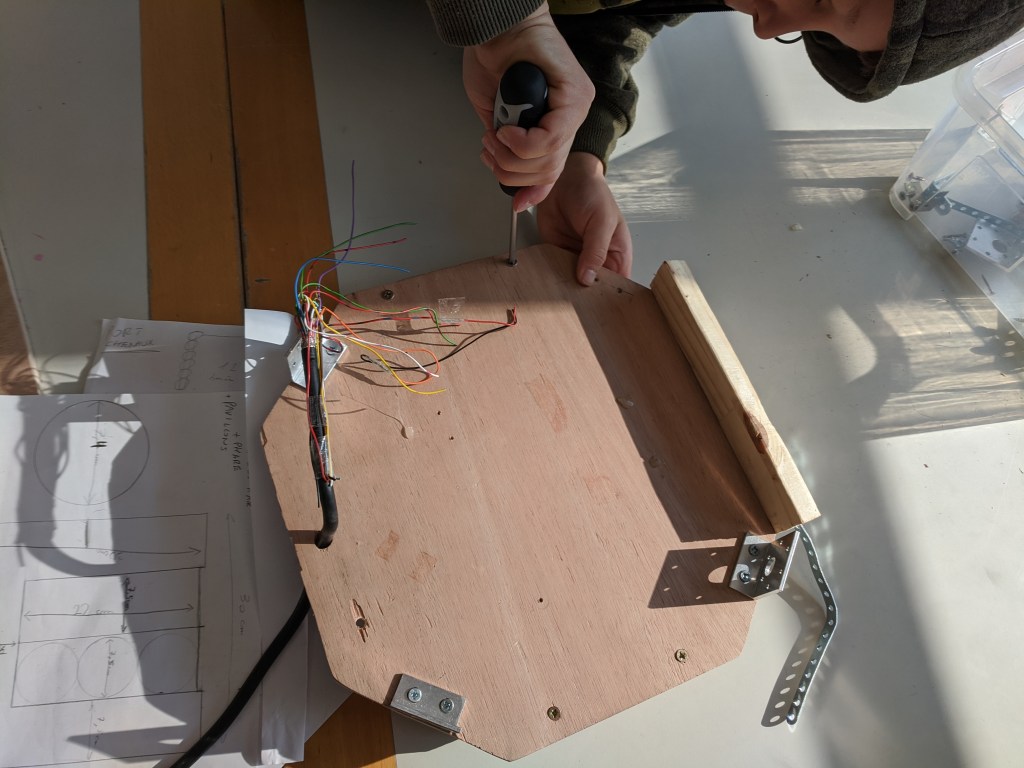
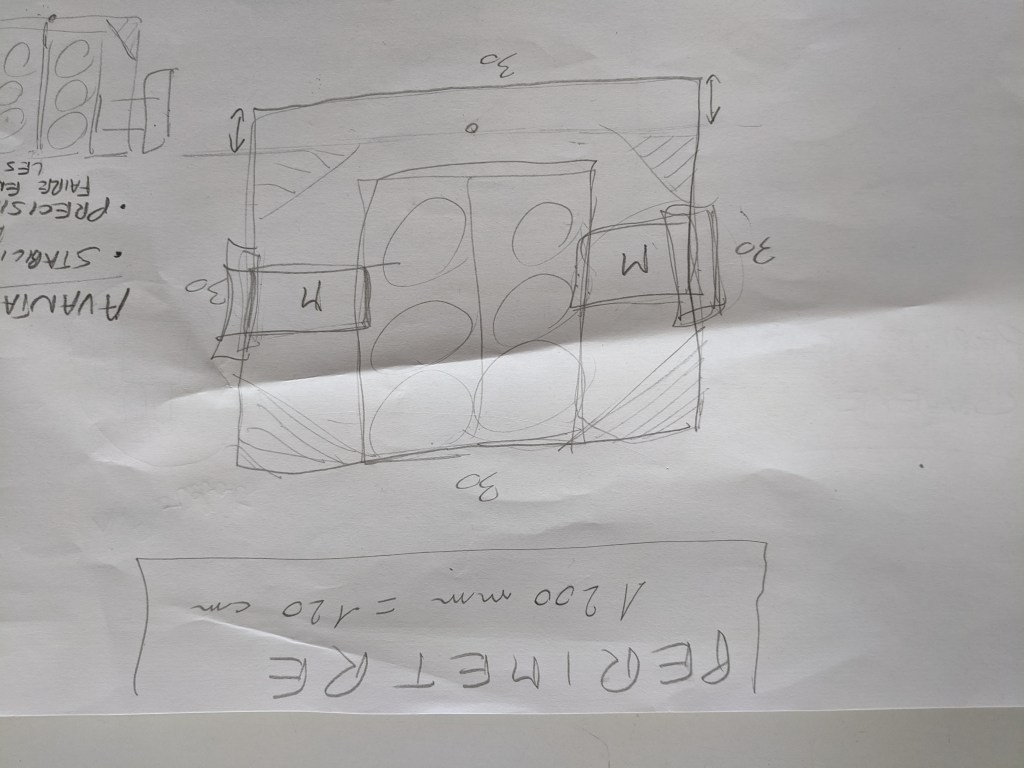
L’autre partie de l’équipe, quant à elle, a commencé à tracer la partie de la base roulante et à démonter le robot de l’année dernière pour récupérer ses moteurs.
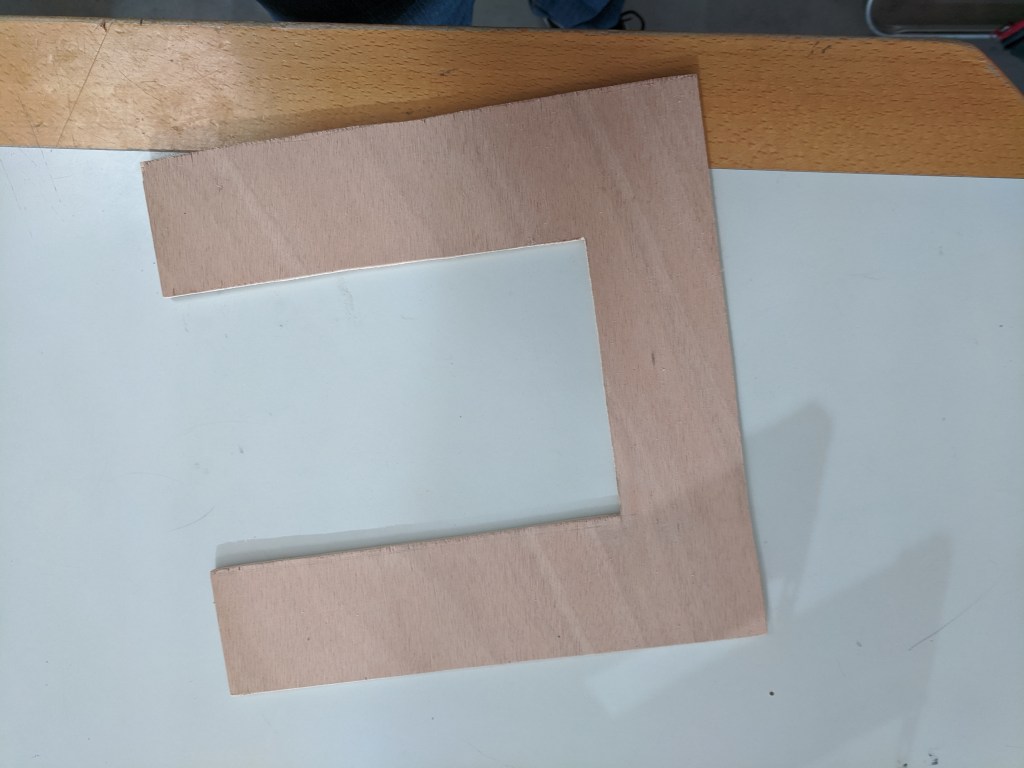
Nous avons utiliser la scie sauteuse et nous étions très fiers 🙂