Teaser : Coupe de France de robotique 2022
La Coupe et de la Coupe Junior se dérouleront à La Roche-sur-Yon du 26 au 28 mai 2022, une bande annonce vient d’être publiée : https://youtu.be/HVytYgA-whE
Regardez bien à la 48ème seconde : on voit passer le robot de l’équipe Grobot B ! ^_^
En ce qui concerne la Coupe Junior (notre catégorie), il s’agira de la finale nationale. Pour y accéder, il faudra se hisser en tête de la finale régionale qui aura lieu samedi 19 mars 2022 à Vaulx-en-Velin.
Statuette
On a repris le dessin de la statuette avec des dimensions compatibles avec le règlement, le « noyau » est dessiné dans TinkerCAD.
Manipulation des carrés de fouille
On a dessiné dans TinkerCAD le double-bras pour effectuer le contact avec le dessus des carrés de fouille.
Prochaine séance : dessin du bras pour basculer les carrés de fouille
Manipulation des échantillons
On a dessiné dans TinkerCAD des bras pour pousser les échantillons vers la pelle.
Prochaine séance : commencer le dessin en 3D d’une pelle optimisée, commencer le développement d’une idée alternative de type pince « double hexagone » (idée soufflée par le père de Neil) ; par ailleurs, on attend toujours la livraison de pompes et électrovannes commandée avant les vacances de la Toussaint…
Stratégie
On a discuté tous ensemble de la stratégie à adopter. Il nous semble que manipuler les échantillons un par un serait une perte de temps, on envisage donc un stockage à bord du robot. Une première difficulté est de pouvoir y amener tous les échantillons avec la même orientation quelle que soit leur source : à plat face en haut, à plat face en bas, verticaux…
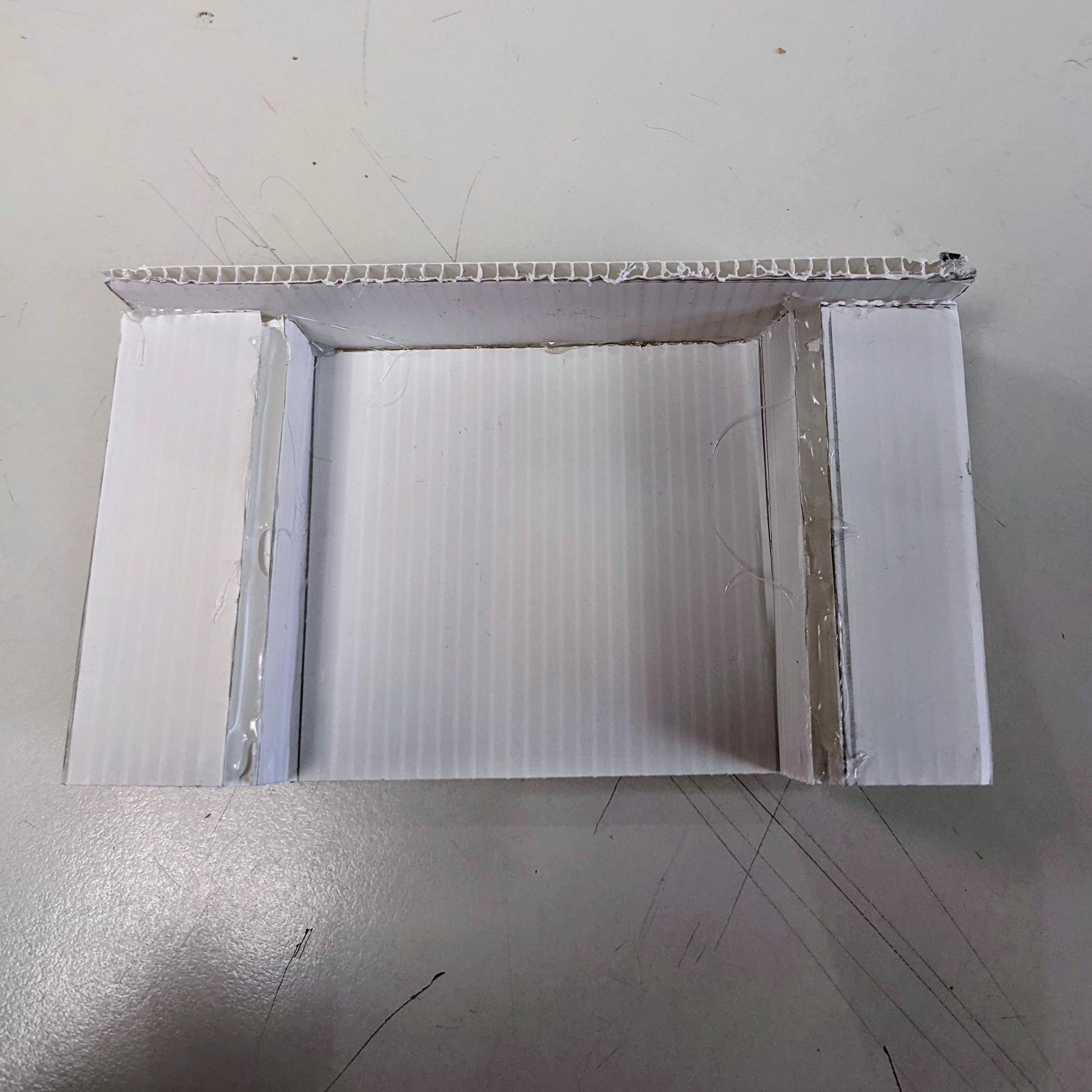
Le collecteur d’échantillons de type « pelle » pourrait avoir 2 modes de fonctionnement :
- ouvrir le fond et se relever partiellement pour laisser glisser l’échantillon et le stocker sans le retourner
- fermer le fond (ou s’appuyer sur la délimitation de la zone de stockage) et effectuer une rotation de plus de 90° avec la pelle pour retourner l’échantillon
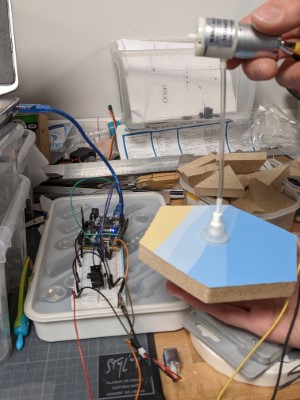
Un actionneur à base de ventouse est envisagé pour les saisir dans le stock et les déposer aux endroits requis : galerie, camps…
Prochaine séance : préciser la stratégie pour la manipulation de la statuette et de la réplique
Robot autonome
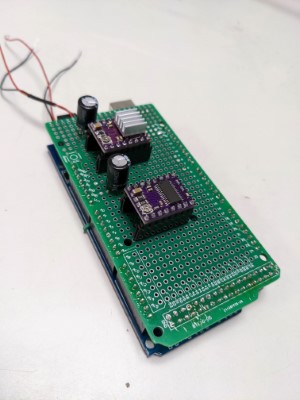
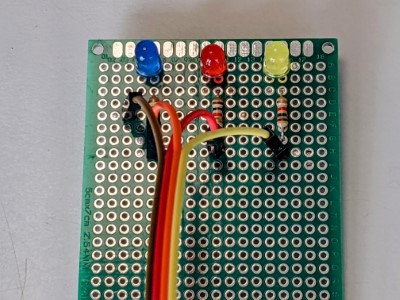
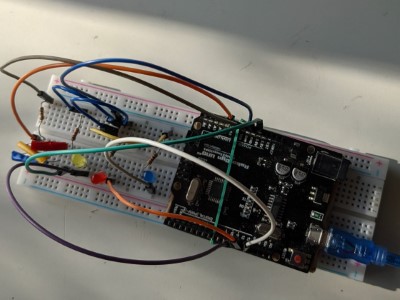
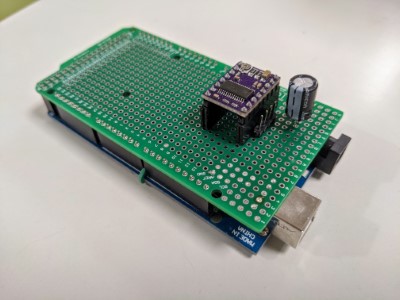
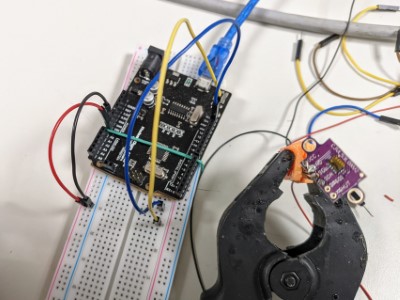
On a continué le câblage de la carte de pilotage d’un moteur pas à pas. Côté navigation, on a réussi à faire fonctionner les capteurs laser de distance : ça fonctionne beaucoup mieux après avoir retiré la minuscule pellicule de protection du capteur ! ^_^’
Prochaine séance : finir de souder la première carte de pilotage de moteur pas à pas et la tester, faire fonctionner le capteur de distance avec des broches non spécifiques I2C (pour ne pas être limité par les 2 ports I2C de l’Arduino Mega)