Apports techniques
On a utilisé TinkerCAD pour dessiner notre catapulte / canon à billes. Nos réalisations sont visibles en ligne :
| Binôme | Lien conception TinkerCAD |
|---|---|
| Neil et Nathan E. | https://www.tinkercad.com/things/g6ZHRx9nskf |
| Yvain et Nathan W. | https://www.tinkercad.com/things/4zY4AWs9qSH |
| Tobie et Hatem | https://www.tinkercad.com/things/3MOTqwNkpV5 |
| Etienne et Pierre-Emmanuel | https://www.tinkercad.com/things/iJVwQMXMvs6 |
| Lilian et Samuel | https://www.tinkercad.com/things/aPakcoCuksK |
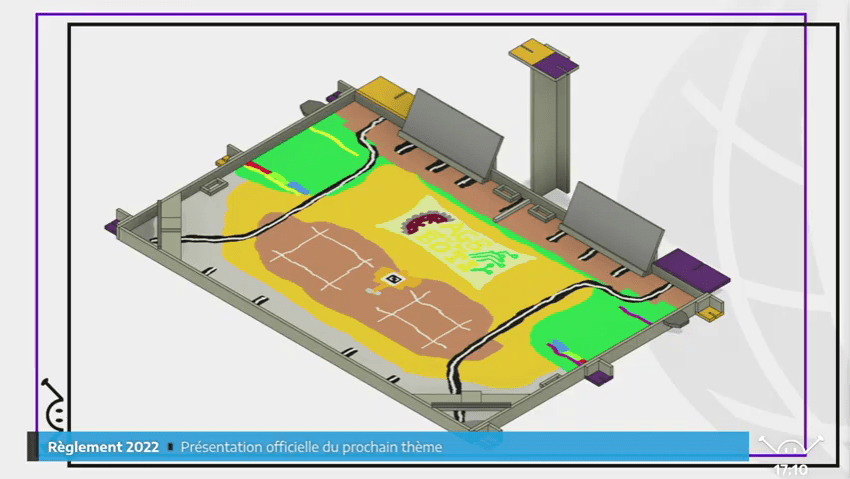
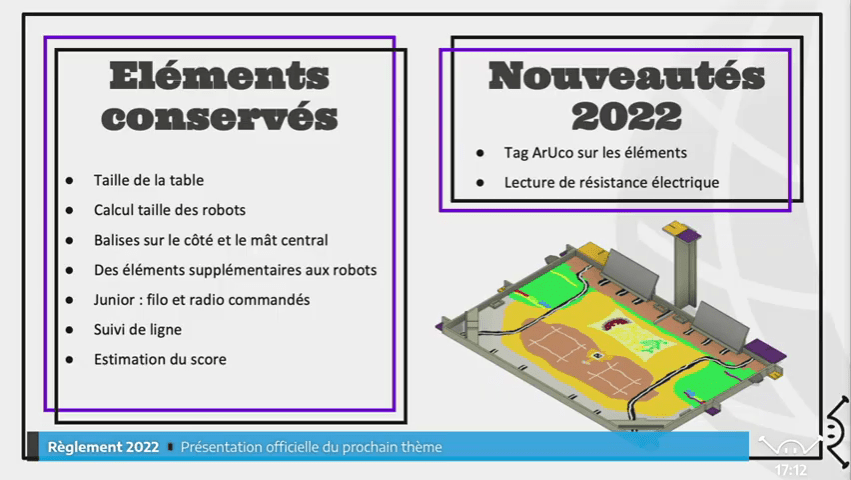
Découverte du règlement
Nous avons parcouru rapidement le règlement version BETA de la compétition, puis nous avons parcouru les diapositives préparées par notre animateur -> voir sur la page Ressources
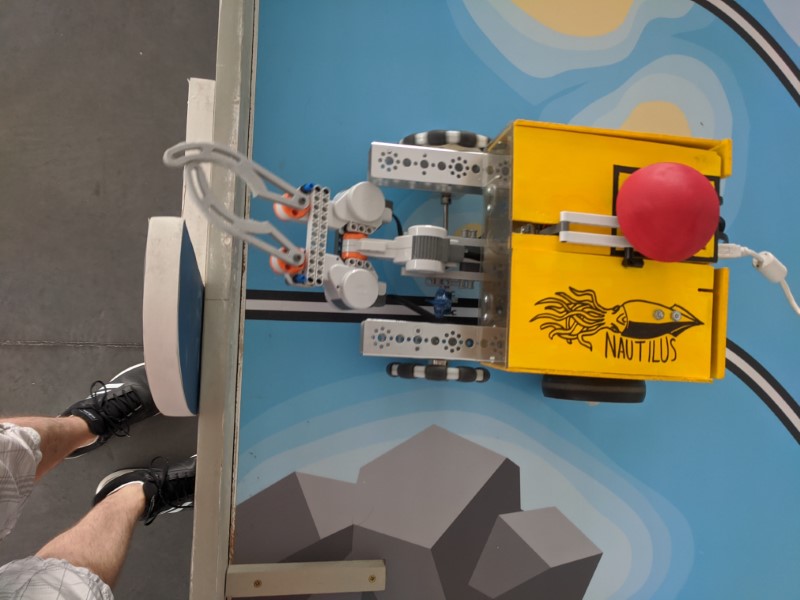
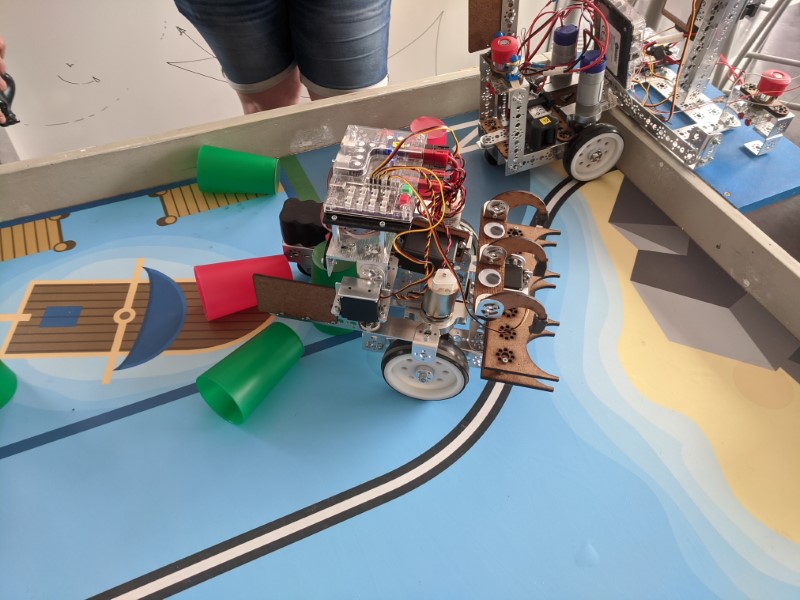
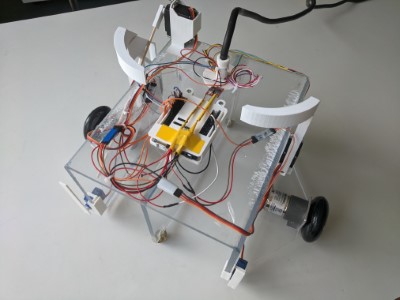
Développement d’un robot autonome
Ben et Maxime n’étant pas disponibles aux horaires du club, ils viendront régulièrement dans nos locaux entre 16h et 18h environ. Ils travailleront sur le développement d’un robot entièrement autonome qui pourrait prendre en charge une partie des actions pendant le match, en complément du robot principal.
Cette première réunion avait pour but d’affiner l’objectif du duo, ainsi que définir l’architecture de base : 2 moteurs pas à pas avec des roues en direct drive, des capteurs de distance optiques, un Arduino Mega, une batterie LiPo 3S (~11V).