Robot principal
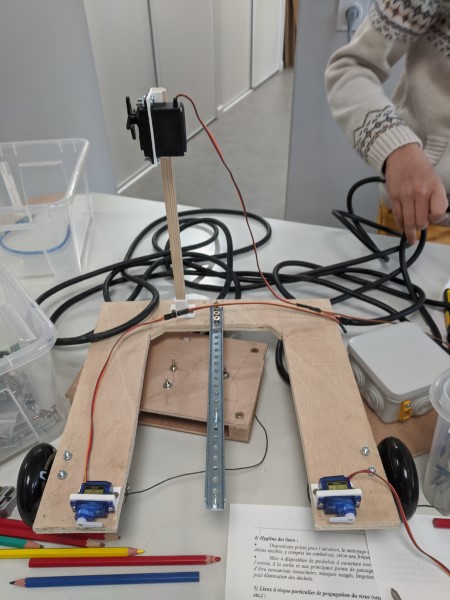
On a fixé le servomoteur sur le mat des pavillons et on a choisi un commencé à fabriquer les pavillons (Echo et Oscar). Pour ne pas gêner le chargement des bouées, on a décidé que la position initiale des pavillons serait au-dessus de la zone des bouées et de hisser les pavillons avec un angle de 90° seulement.
On a également dessiné en 3D une fixation pour le câble en deux versions : ici et ici.
Prochaine séance : continuer la fabrication des pavillons, fixer le câble, câbler les moteurs et tester la motorisation
Phare
On a dessiné le support du roulement à billes. On a installé l’interrupteur sur son support imprimé en 3D.
Prochaine séance : dessiner le support du servomoteur du coude, installer l’Arduino et commencer à câbler les éléments.
