Robot principal
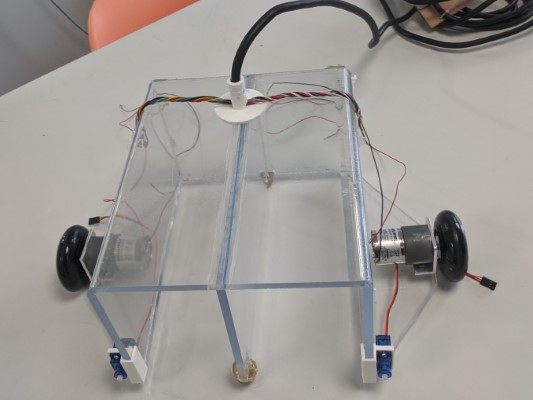
On a réglé des problèmes sur les moteurs des roues et fait rouler le robot avec 2 piles plates (it’s alive!). On a fixé le câble sur le dessus.
Prochaine séance : câbler les moteurs, fixer l’Arduino, dessiner l’actionneur pour les manches à air.
Télécommande
On a commencé à modifier le dessin de la télécommande existante pour lui ajouter des boutons.
Prochaine séance : poursuivre les modifications…
Phare
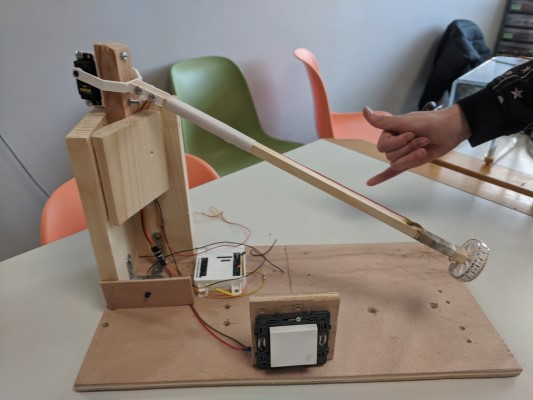
On a assemblé toute la mécanique du phare et commencé le câblage.
Prochaine séance : terminer le câblage, programmer l’Arduino et tester
