Robot principal
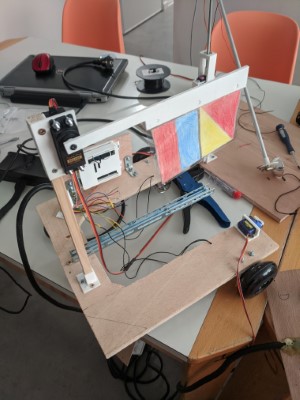
On a corrigé le problème sur le moteur droit, on a installé le bras et les pavillons, on a soudé les commandes pour les barrières et on a écrit une première version du programme Arduino pour piloter les barrières.
Prochaine séance : câbler les servomoteurs pour les barrières et les pavillons, tester le programme Arduino
Télécommande
On a isolé les fils des moteurs.
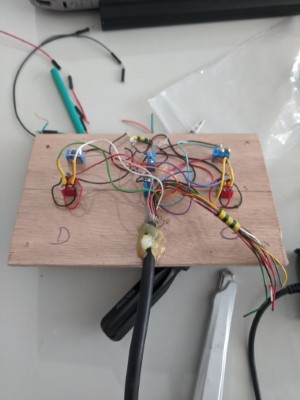
Phare

On a fixé l’Arduino et commencé à câbler l’interrupteur. On a écrit une première version du code Arduino.
Prochaine séance : terminer de câbler et tester le programme Arduino
