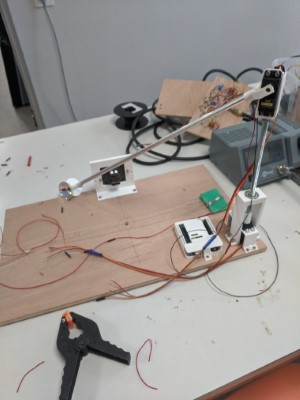
Robot principal
On a installé la carte de conversion 12V-5V et on commencé à câbler les servomoteurs. On a écrit le programme Arduino pour piloter les barrières et le mat des pavillons.
Prochaine séance : câbler les servomoteurs et tester la programme Arduino, reprendre la conception des actionneurs pour les manches à air
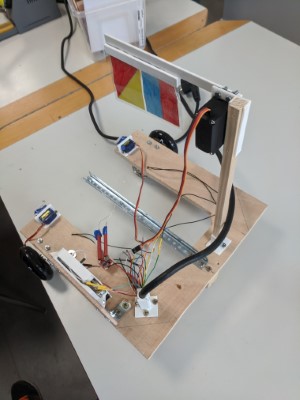
Phare
On a commencé à câbler les servomoteurs et l’Arduino. On a commencé le programme de l’Arduino.
Prochaine séance : continuer le câblage, continuer et tester le programme Arduino
