Manipulation des échantillons
On a continué à dessiner la pelle pour intégrer des moteurs pas-à-pas. On a commencé à dessiner un bras pour manipuler les échantillons avec une ventouse.
Vitrine
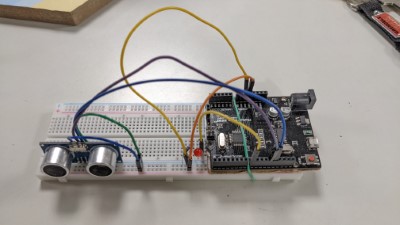
On a commencé à préparer le système de déclenchement de l’éclairage à partir d’un capteur à ultrasons.
On a commencé à dessiner la vitrine et concevoir son éclairage avec un ruban de LEDs.
Robot autonome
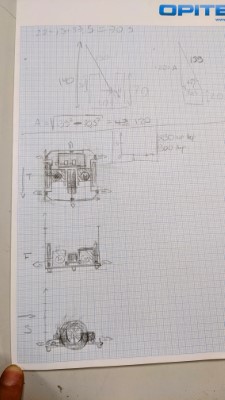
On a dessiné le plan général du robot.
On a préparé un capteur TOF pour des tests de bus (reprogrammation des adresses).
