Base roulante
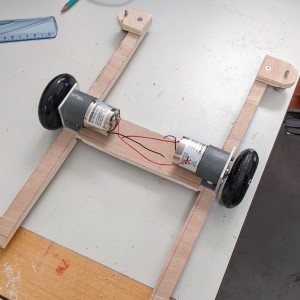
On a refait une base plus adaptée et fixé les moteurs et 2 roues folles.
Manipulation des échantillons
On a avancé sur la modélisation du bras pour la ventouse.
Vitrine

On a placé les cloisons de la vitrine.
.
.
.
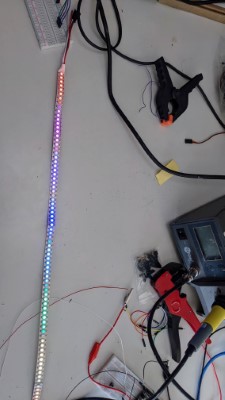
On a soudé des fils et testé le ruban de LEDs avec un programme « arc-en-ciel » trouvé sur un tutoriel.
Robot autonome
On a câblé quelques capteurs TOF. La gestion logicielle de plusieurs capteurs sur un même bus est en cours…
