Manipulation des échantillons
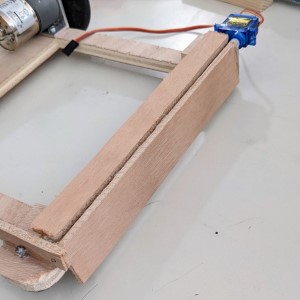
On a ajouté un volet à l’arrière du robot pour contrôler la sortie des échantillons.
On a conçu l’actionneur à ventouse : il n’aura qu’une seule articulation. Son dessin en 3D est en cours.
On a commencé à dessiner les engrenages pour la pelle.
Vitrine
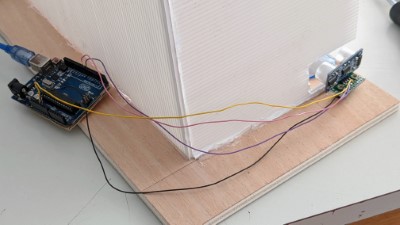
On a installé le capteur ultrasons et soudé des fils.
Robot autonome
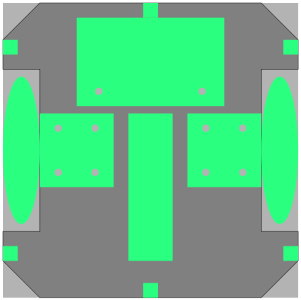
On a commencé à dessiner un plan vectoriel du robot autonome (à plat, vu de dessus) pour préparer la découpe laser de sa platine.
