Manipulation des échantillons
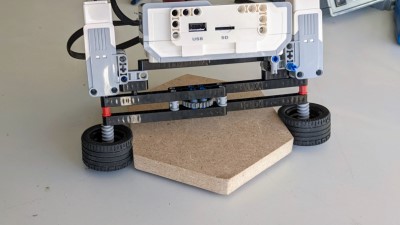
On a évalué le périmètre du robot : les « bananes » prévues pour faire monter les échantillons sur la pelle prennent trop de place, on envisage de les remplacer par des rouleaux qui sont plus compacts et aident à soulever l’échantillon.
On a continué le dessin de la pelle. On a dessiné le bras de l’actionneur à ventouse.
Arduino
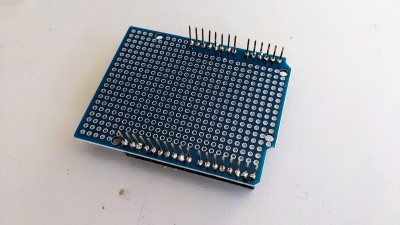
On a soudé les broches d’un « bouclier » Arduino, il servira à distribuer les fils vers les moteurs.
Vitrine
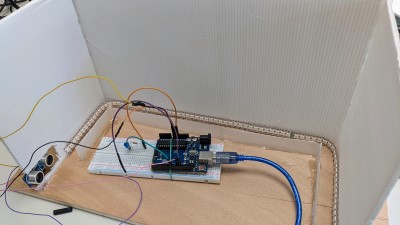
On a installé le ruban de LEDs et des morceaux de plastique dépoli pour servir de diffuseur. On a testé le programme Arduino pour déclencher l’activation de la vitrine.
Robot autonome
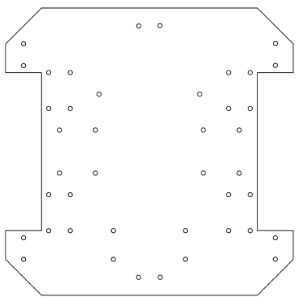
On a terminé le dessin de la base pour permettre une découpe laser.
On a écrit le code pour gérer les 6 capteurs TOF simultanément (à tester).
