Manipulation des échantillons

On a installé le bras à ventouse sur la base roulante. On a terminé le dessin de la pelle. On a réimaginé le système pour faire monter les échantillons pour la pelle avec des moteurs plus puissants.
Vitrine
On a fusionné les programmes de clignotement des LEDs et de détection par ultrasons. On a commencé à couvrir le ruban de LEDs avec du plastique dépoli.
Robot autonome
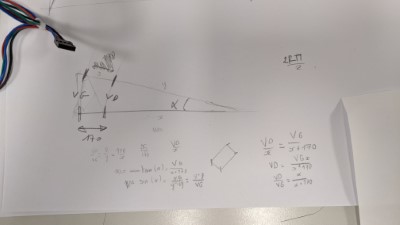
On a commencé à câbler les capteurs ToF sur l’Arduino. On a planifié la trajectoire du robot et commencé les calculs.
Poster
On a pris des photos individuelles pour le trombinoscope de l’équipe.
