Manipulation des échantillons
On a amélioré le dessin de la pelle. On a constaté que les pneus destinés à pousser les échantillons sur la pelle étaient trop hauts, on a prévu d’imprimer et tester des pneus en matériau flexible.
On a installé la pompe à air sur le robot principal, avec son tube.
Vitrine
On a ajouté une carte de conversion 12V vers 5V, on a continué à préparer des morceaux de plastique dépoli pour couvrir les LEDs.
Robot autonome
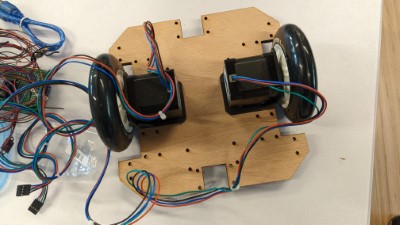
Pendant les vacances scolaires, on est allé au fablab de La Casemate pour découper au laser la « semelle » du robot. Cette planche nous a permit de fixer les deux moteurs pas-à-pas et tester un premier déplacement en courbe : le robot a effectué un quart de cercle d’1 mètre de rayon, comme prévu par le calcul !
On a terminé de câbler les 6 capteurs laser de distance sur l’Arduino et on a commencé à les tester. On a commencé à dessiner les supports pour fixer les roues folles.
