Propulsion
On a raccourci et collé les fils des moteurs de propulsion du robot principal.
Manipulation des échantillons

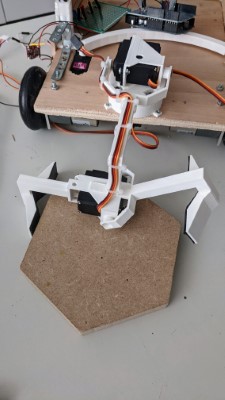
On a remplacé les cloisons autour du lieu de stockage en utilisant du contreplaqué (plus rigide). On a remplacé le système d’éjection des échantillons. On a amélioré le système de rotation de la pince. On a élargi la pince, notamment pour saisir les échantillons par les pointes.
Télécommande
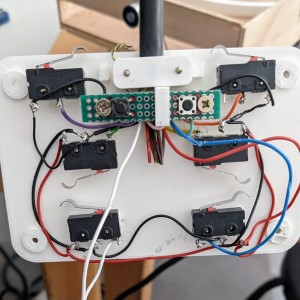
On a câblé les deux boutons sur le dessus de la télécommande.
Programmation
On a commencé à dessiner le diagramme d’états du robot.
Vitrine et statuette
On a ajouté une vis de fixation de la vitrine sur la table de jeu, on a limé les vis qui dépassaient sous la base.
On a testé la commande de l’électroaimant par l’Arduino.
Poster
On a redéfini la maquette du poster. On a rédigé les textes de présentation de l’équipe, du robot et de la vitrine. On a choisi des hiéroglyphes à coller sur le poster, ainsi que les fonds des photos des membres de l’équipe.
