Beaucoup d’absents pour cette séance…
Propulsion

On a découpé une planche de contreplaqué pour faire la nouvelle base de notre robot principal puis fixé les équerres pour installer les moteurs.
On a démonté les moteurs et certains actionneurs sur le robot précédent.
Manipulation des échantillons
On a dessiné un support pour les servomoteurs des actionneurs à ventouse à l’avant du robot.
Écran d’affichage du score
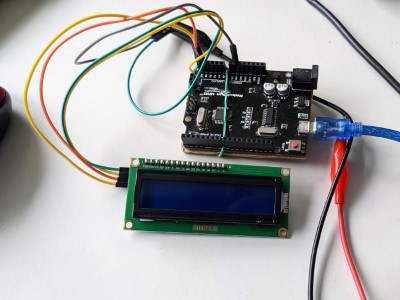
On a mis en fonction un afficheur LCD via I2C, avec mBlock puis avec l’IDE Arduino.
Robot autonome
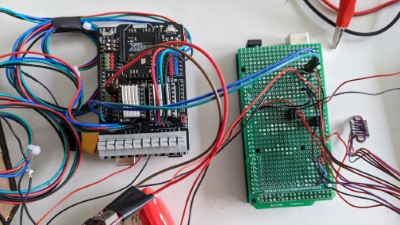
On a connecté et testé avec succès les moteurs pas-à-pas à un nouveau shield, installé sur l’Arduino Uno.
On a commencé à tester la communication I2C entre les Arduino : ça fonctionne bien pour un cas simple.
