Propulsion
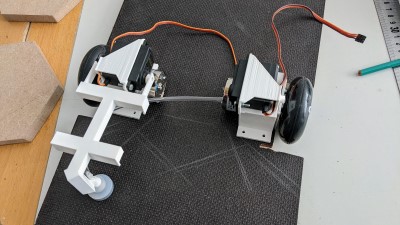
On a fixé les moteurs et les roues, on a tracé la découpe à effectuer à l’avant du robot.
Manipulation des échantillons
On a modélisé un support pour une pompe et une électrovanne.
Affichage du score
On a manipulé l’afficheur avec mBlock. Reste à le piloter depuis la télécommande…
Robot autonome
On est revenu sur l’interrogation de plusieurs capteurs de distance en parallèle : ça coince encore.
On a modifié un modèle 3D pour renforcer le support des servomoteurs.
