Robot principal

On a fixé les équerres des moteurs. On a modélisé les barrières et un support de câble.
Prochaine séance : fixer les moteurs, fixer le câble, câbler les moteurs et tester.
Phare
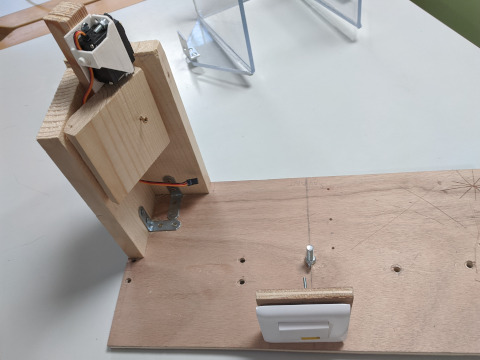
On a fixé le servomoteur du coude et l’interrupteur d’allumage. On a modélisé la charnière du coude et on a commencé le code de l’Arduino.
Prochaine séance : assembler le bras, terminer le code Arduino, câbler.
