Robot principal
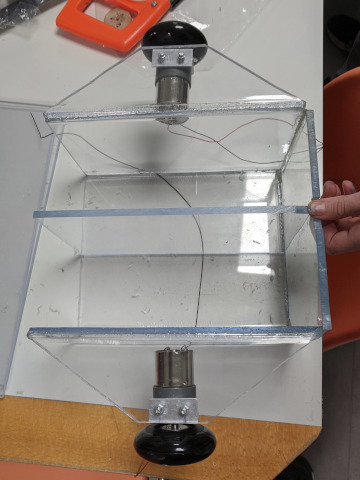
On a fixé les moteurs et les roues, on a découpé un morceau de plexi pour faire la séparation entre les bouées.
Prochaine séance : fixer les « roues folles », installer le câble et connecter les moteurs, tester le déplacement avec la télécommande
Télécommande
On a fixé le boitier de connexion sur une plaque pour maintenir les câbles autour, on a refait quelques soudures derrière la télécommande et on a dessiné des capuchons pour les joysticks.
Prochaine séance : continuer le travail de reprise de la télécommande pour être en mesure de faire rouler le robot
Phare
On a déplacé le servomoteur pour allonger la diagonale, on a installé un interrupteur pour replier le bras et on a installé l’Arduino. On a modélisé le support des LEDs qui iront au sommet et modifié la charnière du coude pour s’adapter à la nouvelles configuration du servomoteur.
Prochaine séance : installer le bras et le sommet, câbler tout ça et écrire le code pour l’Arduino
