Robot principal
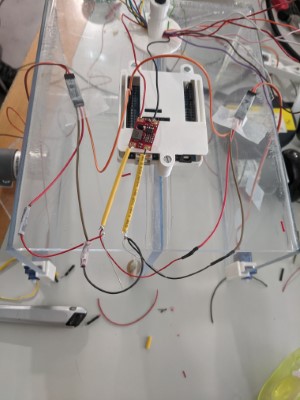
On a câblé les servomoteurs des barrières.
Prochaine séance : tester les moteurs et les servomoteurs des barrières.
Télécommande
On a continuer à câbler la boîte de dérivation et isoler la télécommande temporaire. On a (un peu) continué le design 3D de la nouvelle télécommande.
Prochaine séance : terminer le design de la télécommande pour pouvoir l’imprimer
Phare
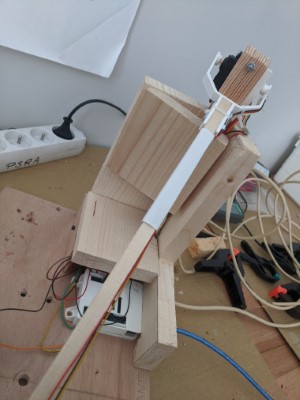
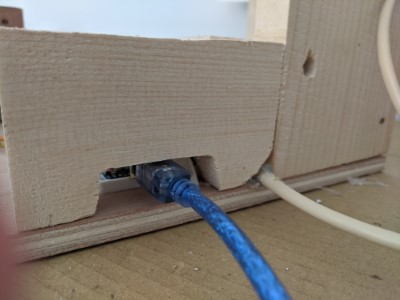

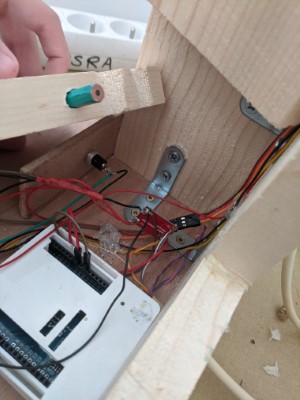
On a terminé le câblage et ajouté des planches de bois pour cacher le câblage. On a assemblé le code Arduino des servomoteurs et celui des LEDs et commencé à tester.
Prochaine séance : faire fonctionner le code Arduino, continuer à améliorer l’esthétique
