Manipulation des échantillons
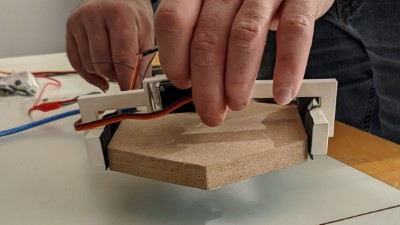
On a ajouté du caoutchouc sur la mâchoire de la pince et on a testé avec un servomoteur : ça fonctionne !
On a commencé à dessiner le bras pour lever la pince.
On a tracé la découpe sur la base du robot pour installer le servomoteur de rotation.
Vitrine
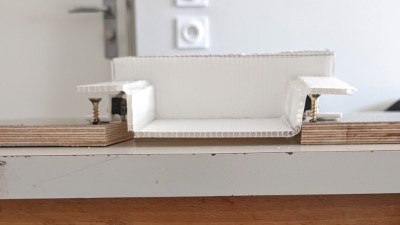
On a découpé la planche pour installer le plateau et on a ajouté des vis pour stabiliser le plateau.
Télécommande
On a essayé de voir si la télécommande envisagée a suffisamment de boutons pour couvrir les besoins du robot cette année : pas facile à dire ! Le mieux serait sans doute de commencer à la fabriquer puis adapter le logiciel pour restreindre le nombre de boutons…
