Manipulation des échantillons
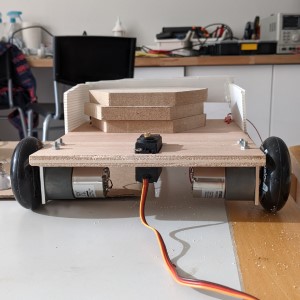
On a installé le servomoteur de rotation de la pince sur la base roulante. On a placé des cloisons autour du stock d’échantillons et on a commencé à imaginer le mécanisme d’éjection des échantillons.
Sur la table de jeu, on a estimé qu’on ne pouvait pas avoir un bras de pince assez grand pour déposer un échantillon en haut de la galerie. On va donc dimensionner le bras de la pince pour atteindre le bas de la galerie et le stockage à l’arrière du robot.
On a modélisé la cage autour du servomoteur pour lever la pince.
Télécommande
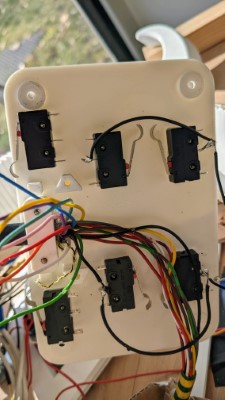
On a dessoudé la télécommande de la saison précédente. On a installé les interrupteurs sur la nouvelle télécommande et on a commencé à souder les fils.
Vitrine


On a soudé des fils sur les interrupteurs et on a installé ces interrupteurs sur la plaque de base. On a assemblé les lampes qui viendront éclairer la vitrine.
