Manipulation des échantillons
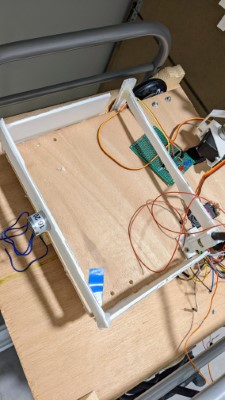
On a constaté que le bras d’éjection était trop haut, on a corrigé le modèle 3D.
On a ajouté une cloison pour éviter que les échantillons gênent le bras de manipulation.
On a ajouté un électroaimant pour attraper la statuette.
On a fixé l’Arduino sous la « semelle » du robot.
Vitrine et statuette

On a fixé la plaque de soutient du décor, on a fixé les fils et la pile.
On a ajouté une plaque métallique à l’avant de la base de la statuette pour qu’elle puisse être aimantée par l’électroaimant installé sur le robot.
Télécommande
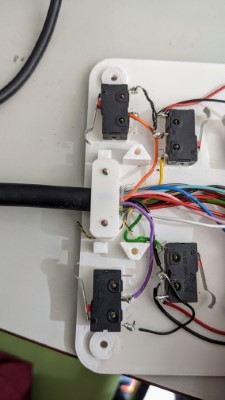
On a câblé les gâchettes de la télécommande.
Poster
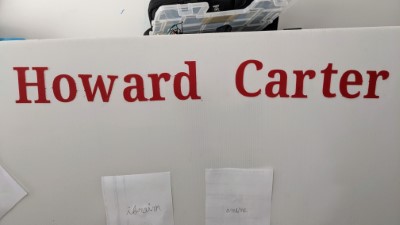
On a collé les lettres du titre (imprimées en 3D).
