Propulsion

On a choisi de changer le mode de propulsion de notre robot principal pour utiliser des roues holonomes, placées dans les coins d’une base carrée, avec un moteur par roue. Exemple de déplacement obtenu avec ce genre de plateforme : https://www.youtube.com/watch?v=pe9Ghe5AMQ8
On a donc commencé à fabriquer une nouvelle base roulante adaptée. On a démonté les moteurs du châssis précédent.
Télécommande
La propulsion holonome requiert une autre télécommande. On a donc démonté le câble de la télécommande actuelle et on a commencé à préparer l’alimentation électrique de la nouvelle manette.
Roues holonomes
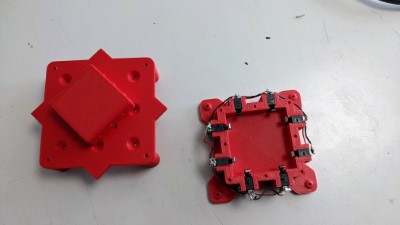
On a modélisé un moyeu pour fixer les roues holonomes sur nos moteurs électriques.
