L’info de la semaine
Le week-end dernier, l’équipe « Labo404 » a remporté le concours belge ROBOTIX dans la catégorie junior (voir leur tweet). Bien évidemment, ils ont le même règlement que nous, d’où l’intérêt d’aller voir ce qu’ils ont fait. Et c’est du beau travail, très pro !
=> Allez voir la présentation de leur robot sur leur site web et quelques photos en plus dans leur album.
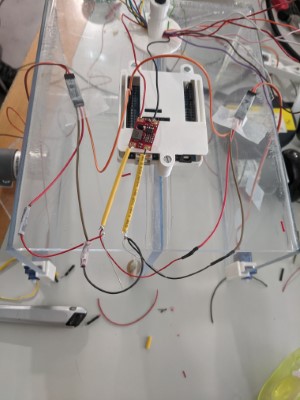
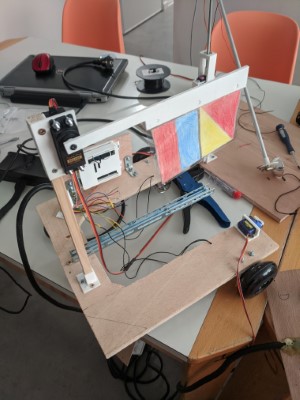
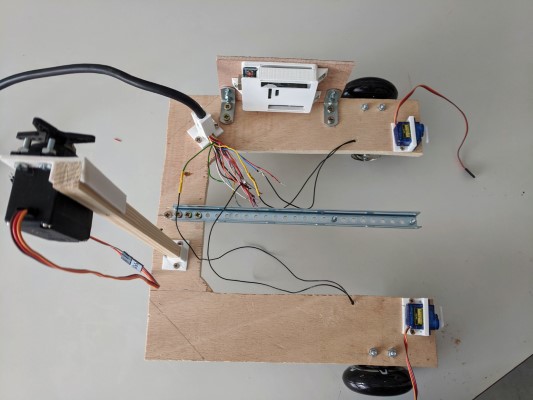
Robot principal
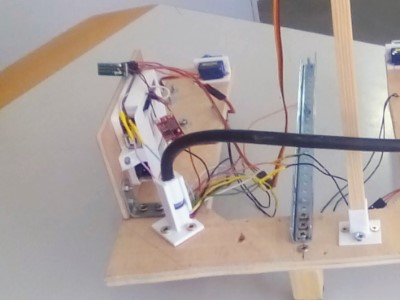
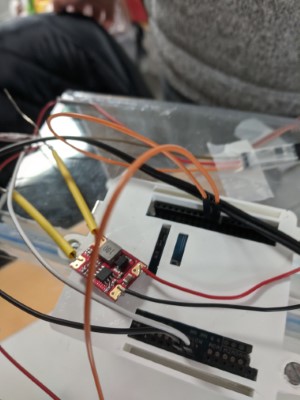
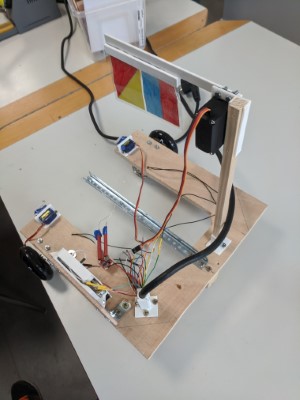
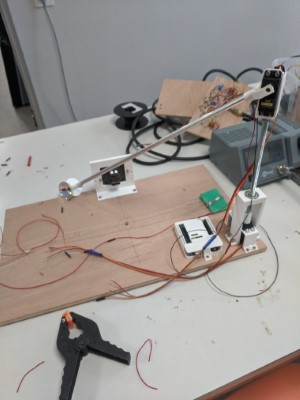
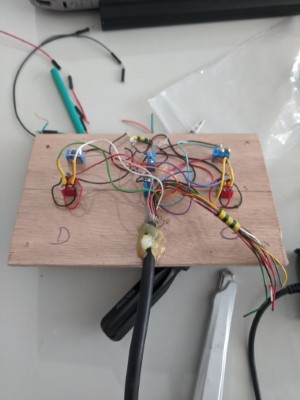
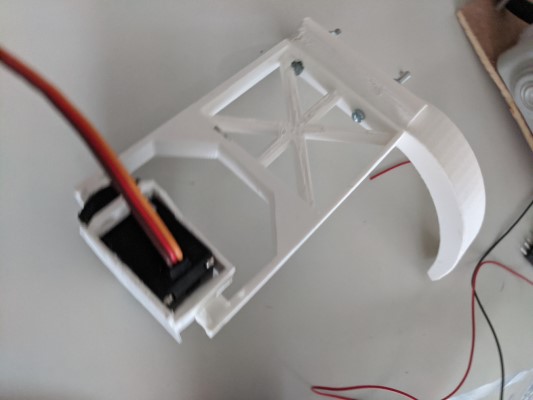
On a refait une partie des soudures de l’alimentation avec une plaque de prototypage. On a dessiné le support du servomoteur pour l’actionneur des manches à air. On a nettoyé le programme de l’Arduino : ajout de commentaires, assignation des ports, etc.
Prochaine séance : continuer les soudures de l’alimentation, dessiner la charnière de l’actionneur des manches à air
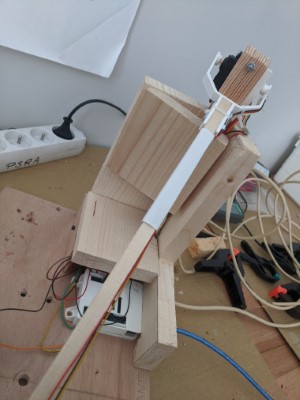
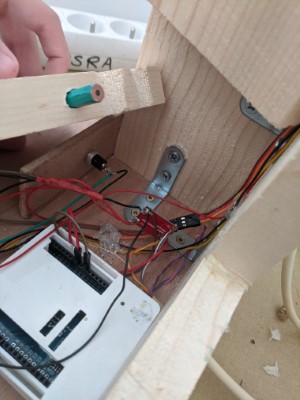
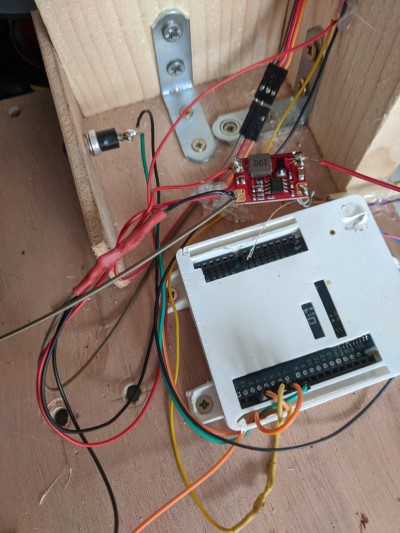
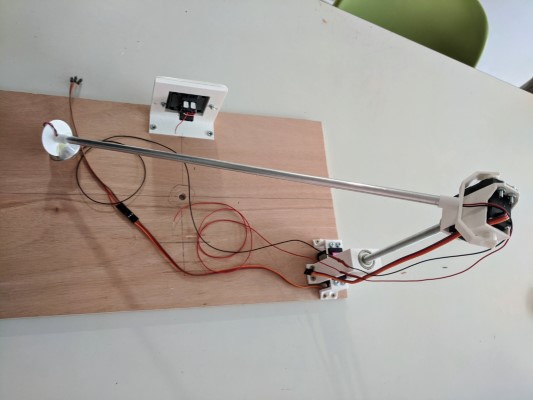
Phare
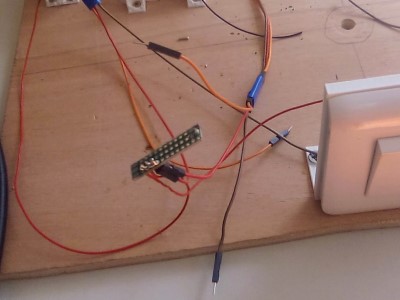
On a refait une partie des soudure de l’alimentation avec une plaque de prototypage.
Prochaine séance : continuer les soudures de l’alimentation, tester le programme de l’Arduino