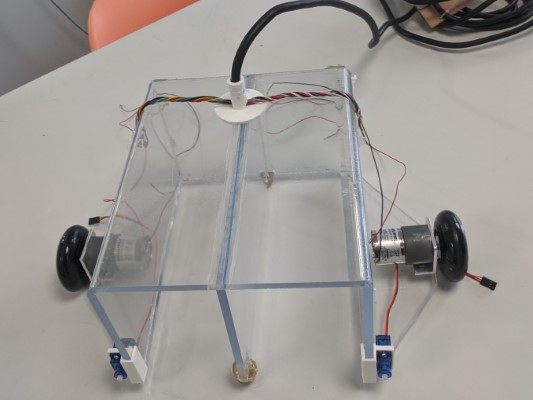
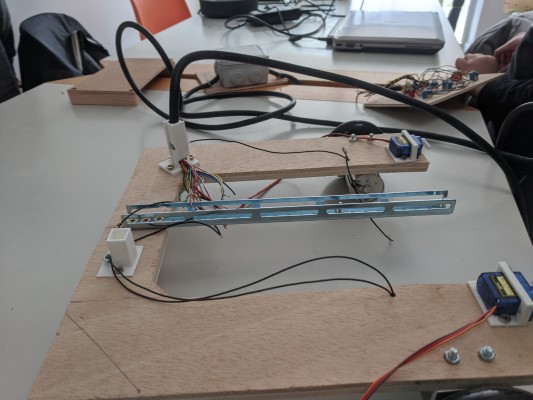
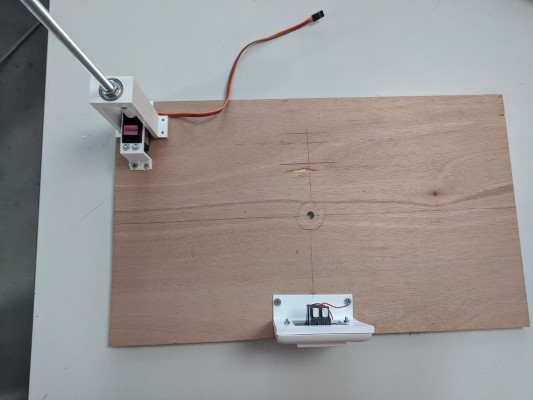
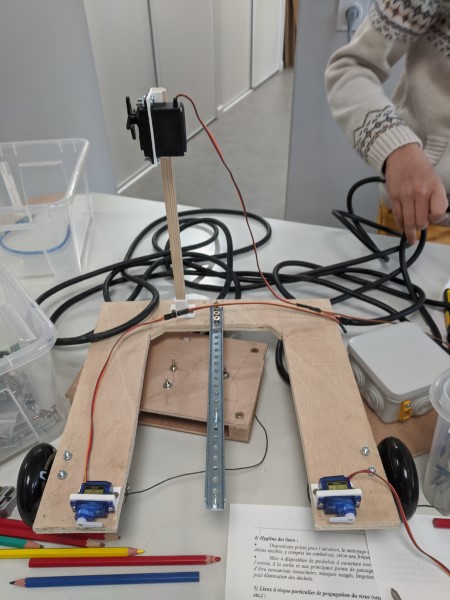
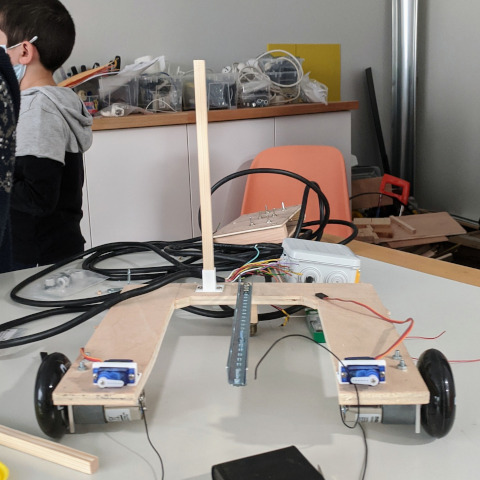
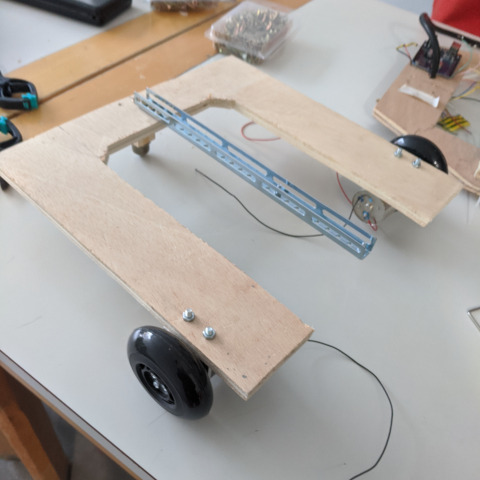
Robot principal
On a fixé la séparation des bouées et préparé l’emplacement des roues folles (au premier essai elles étaient trop basses). On a réfléchi à une forme d’actionneur pour redresser efficacement les manches à air.
Prochaine séance : fixer les roues folles, installer le câble, câbler les moteurs
Télécommande
On a décidé d’opter pour une télécommande imprimée en 3D, conçue à partir d’un modèle existant (mais dessinée avec un autre logiciel). On a choisi l’emplacement des 4 boutons à ajouter : 2 à l’arrière, 2 sur le dessus.
Prochaine séance : importer le modèle de la télécommande dans TinkerCAD et la modifier
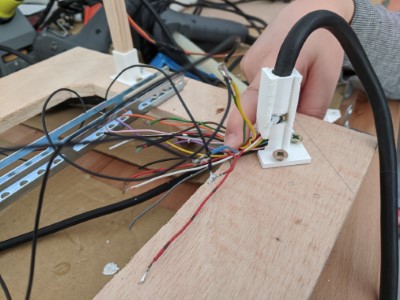
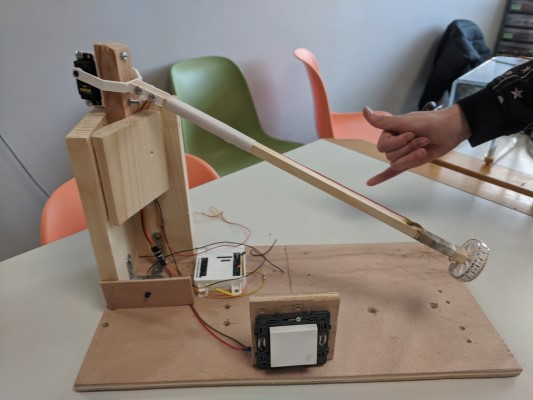
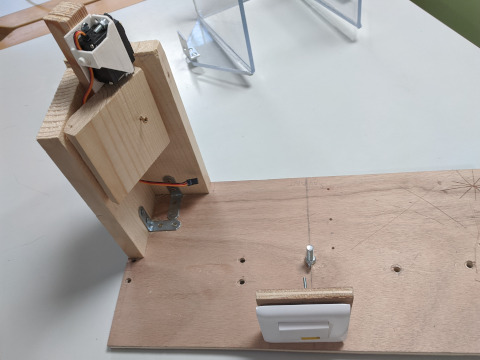
Phare
On a fixé les LEDs au sommet du phare et allongé les fils. On a modifié le dessin de la charnière du coude.
Prochaine séance : assembler le coude, câbler l’Arduino, écrire le programme